Note
Go to the end to download the full example code.
Aligning active Brownian particles — generic pairs API¶
Infer pairwise interaction forces in a system of aligning active
Brownian particles (ABPs) using generic pair-interaction building
blocks from SFI.bases.pairs.
First we simulate the ABP system using the pre-built ABP model, then save and reload the trajectory to demonstrate the I/O round-trip, and finally construct a generic pair-interaction basis for linear inference.
This example demonstrates:
Simulating a multi-particle ABP system with an example-local ABP helper (thin wrapper around
SFI.bases.pairs).Saving and loading trajectory data (CSV round-trip).
Constructing a generic Basis from
heading_vector(),radial_pair_basis(), andangular_pair_basis().Linear force inference using that basis.
Recovering the learned interaction kernels vs the true model.
Tags
synthetic · overdamped · multi-particle · linear · interactions
System: aligning active Brownian particles¶
Each particle has position \((x, y)\) and heading \(\theta\) — three degrees of freedom. The force includes:
Self-propulsion: \(c_0\,\hat{e}_\theta\)
Pairwise repulsion: short-range, radially repulsive: \(\varepsilon\, e^{-r/R_0}\,\hat{r}_{ij}\)
Pairwise alignment: angular torque: \(A\,\sin(\Delta\theta)\,e^{-r/L_0}\)
Positions obey periodic boundary conditions.
N_particles = 60
Lx, Ly = 30.0, 30.0 # periodic box dimensions
Nsteps = 2000 # simulation length
dt_sim = 0.02 # integration time step
D_iso = 0.05 # isotropic diffusion coefficient
seed = 0
box = jnp.array([Lx, Ly])
# True model parameters
c0_true = 1.0 # self-propulsion speed
eps_true = 2.0 # repulsion strength
A_true = 0.5 # alignment strength
R0_true = 1.0 # repulsion length scale
L0_true = 2.0 # alignment length scale
theta_F_exact = dict(c0=c0_true, eps=eps_true, A=A_true,
R0=R0_true, L0=L0_true)
Simulating the true model¶
We build the ABP model from the helpers in
_gallery_utils/abp.py (a thin composition of
SFI.bases.pairs primitives). The result is a parametric
state function (PSF) with named parameters c0, eps, A,
R0, L0.
from _gallery_utils.abp import make_abp_align_psf
from SFI.langevin import OverdampedProcess
F_psf = make_abp_align_psf(dim=3)
proc = OverdampedProcess(F_psf, D=D_iso, extras_global={"box": box})
proc.set_params(theta_F=theta_F_exact)
# Random initial conditions: uniform in box, random headings
key = random.PRNGKey(seed)
key, kx, kth = random.split(key, 3)
X0_xy = random.uniform(kx, (N_particles, 2)) * jnp.array([Lx, Ly])
TH0 = random.uniform(kth, (N_particles,), minval=-jnp.pi, maxval=jnp.pi)
x0 = jnp.concatenate([X0_xy, TH0[:, None]], axis=1)
proc.initialize(x0)
key, sub = random.split(key)
coll = proc.simulate(dt=dt_sim, Nsteps=Nsteps, key=sub)
print(f"Trajectory: {coll.T} frames, "
f"{coll.N} particles, dim={coll.d}")
Trajectory: 2000 frames, 60 particles, dim=3
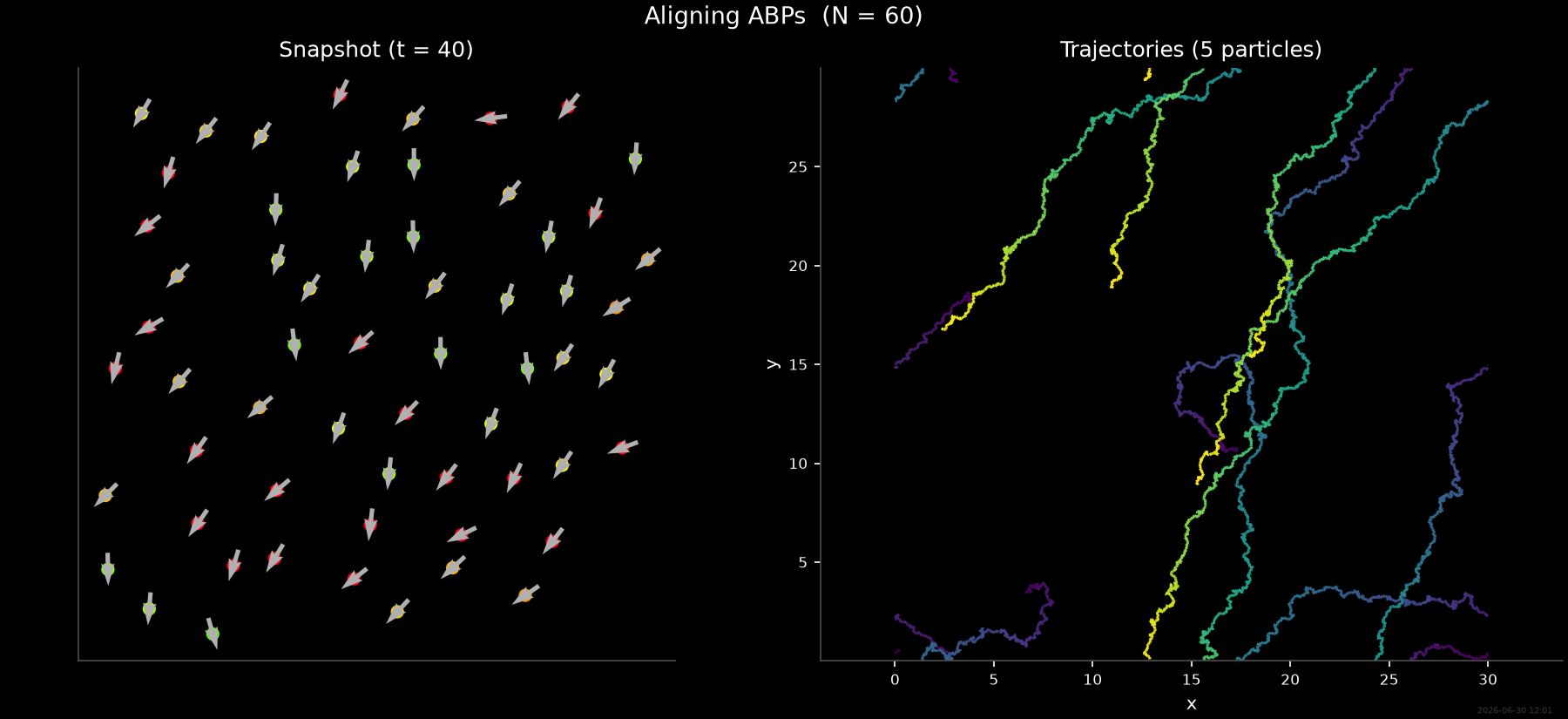
Simulation movie¶
Animation of the simulated ABP system. Particles are coloured by heading angle \(\theta\); white arrows show the propulsion direction.
Xfull = np.asarray(coll.X) # full trajectory array (T × N × 3)
Saving and loading trajectory data¶
SFI trajectory collections can be serialised to CSV, Parquet, or
HDF5 via save().
Global extras — here the periodic box — are embedded in a YAML
header and survive the round-trip.
import os, tempfile
from SFI.trajectory import TrajectoryCollection
csv_path = os.path.join(tempfile.gettempdir(), "sfi_abp_demo.csv")
coll.save(csv_path, format="csv")
with open(csv_path) as f:
for line in f.readlines()[:10]:
print(line.rstrip())
print(" ...")
# Reload into a fresh collection and verify
coll_reloaded = TrajectoryCollection.load(csv_path)
print(f"\nOriginal: T={coll.T}, N={coll.N}, d={coll.d} → Loaded: T={coll_reloaded.T}, N={coll_reloaded.N}, d={coll_reloaded.d}")
max_err = float(np.max(np.abs(coll_reloaded.X - coll.X)))
print(f"Max |ΔX| = {max_err:.1e} (numerical round-trip error)")
# ---
# kind: overdamped
# dimension: 3
# pdepth: 1
# num_particles: 60
# x0:
# - - 0.21881461143493652
# - 0.6267356872558594
# - 2.5286648273468018
# - - 17.442794799804688
...
Original: T=2000, N=60, d=3 → Loaded: T=2000, N=60, d=3
Max |ΔX| = 7.5e-09 (numerical round-trip error)
Particle snapshot¶
Final-frame snapshot with heading arrows (left) and individual particle trajectories (right). Positions are wrapped into the periodic box; particles are coloured by heading angle.
n_show = min(5, N_particles) # trajectories to display
Building the pair-interaction basis¶
For inference, we construct a generic basis from building blocks
in SFI.bases.pairs. The basis is deliberately over-complete
— it contains many more radial kernels than the true model uses —
so the linear solver must pick out the right combination.
Self-propulsion —
heading_vector()gives the unit heading \((\cos\theta, \sin\theta, 0)\).Radial repulsion —
radial_pair_basis()with exponential- polynomial kernels.Angular alignment —
angular_pair_basis()with a \(\sin(\Delta\theta)\) coupling.
from SFI.bases.pairs import (
angular_pair_basis,
exp_poly_kernels,
heading_vector,
radial_pair_basis,
)
from SFI.statefunc import Basis
dim = 3 # (x, y, θ) per particle
# Radial kernels: r^n * exp(-r/L) for n ∈ {0,1}, L ∈ {0.5, 1, 2, 4}
repel_kernels = exp_poly_kernels(degrees=[0, 1], lengths=[0.5, 1.0, 2.0, 4.0])
align_kernels = exp_poly_kernels(degrees=[0, 1], lengths=[0.5, 1.0, 2.0, 4.0])
# Self-propulsion: (cos θ, sin θ, 0)
B_heading = heading_vector(dim=dim, angle_index=2)
# Radial pair repulsion → dispatched Basis (acts in xy-plane)
inter_repel = radial_pair_basis(
repel_kernels, dim=dim,
box="extras",
spatial_dims=slice(0, 2), # xy positions for distance
embed_dim=dim, embed_axes=[0, 1], # embed radial force into xy
)
B_repel = inter_repel.dispatch_pairs(
symmetric=True, exclude_self=True,
owners="focal", reducer="sum", return_as="basis",
)
# Angular alignment → dispatched Basis (acts on θ)
inter_align = angular_pair_basis(
align_kernels, jnp.sin, dim=dim,
angle_index=2, output_index=2, # coupling: sin(Δθ) → force on θ
box="extras",
spatial_dims=slice(0, 2),
)
B_align = inter_align.dispatch_pairs(
symmetric=True, exclude_self=True,
owners="focal", reducer="sum", return_as="basis",
)
# Stack into one combined basis for inference
B_full = Basis.stack([B_heading, B_repel, B_align])
n_heading = B_heading.n_features
n_repel = B_repel.n_features
n_align = B_align.n_features
Linear force inference¶
Standard infer_force_linear() recovers the interaction
coefficients in a single linear solve — no gradient-based
optimisation needed.
from SFI import OverdampedLangevinInference
from SFI.utils import plotting
# Create inference object from the trajectory collection
inf = OverdampedLangevinInference(coll)
# Estimate diffusion coefficient
inf.compute_diffusion_constant(method="WeakNoise")
# Solve for force coefficients (one-shot linear solve)
inf.infer_force_linear(B_full, M_mode="Ito", G_mode="rectangle")
# Estimate coefficient uncertainty (populates force_coefficients_covariance)
inf.compute_force_error()
# Compare to exact model for quantitative error metrics
inf.compare_to_exact(model_exact=proc, maxpoints=2000)
inf.print_report()
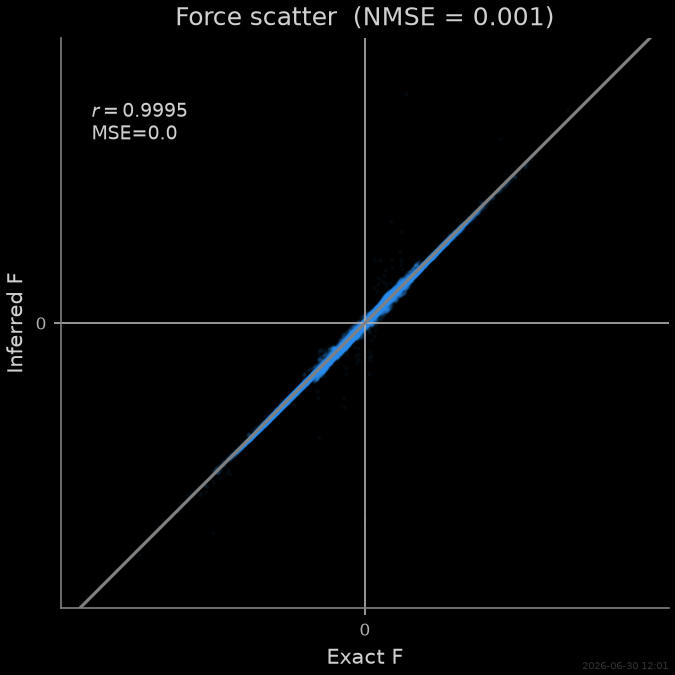
nmse_abp = float(inf.NMSE_force) # reused in the force-scatter title
--- StochasticForceInference Report ---
Average diffusion tensor:
[[ 4.9648169e-02 -1.6120239e-05 -1.0172471e-04]
[-1.6120215e-05 4.9877696e-02 -1.6907154e-04]
[-1.0172469e-04 -1.6907144e-04 4.9801379e-02]]
Measurement noise tensor:
[[-1.5219006e-04 -8.3711362e-05 5.3390534e-07]
[-8.3711362e-05 -2.2979152e-04 -3.4853206e-06]
[ 5.3390534e-07 -3.4853210e-06 -8.2759789e-06]]
Force estimated information: 12177.7060546875
Force: estimated normalized mean squared error (sampling only): 0.0005337358762452214
Normalized MSE (force): 0.0007
Normalized MSE (diffusion): 0.0000
Force Coefficient Table
──────────────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
──────────────────────────────────────────────────────────────────────────
0 e_heading 9.95722e-01 6.56048e-03 151.8 ***
1 r^0·exp(-r/0.5) 3.34897e+00 1.93552e+00 1.7 ·
2 r^0·exp(-r/1) -4.99166e+00 2.76279e+00 1.8 ·
3 r^0·exp(-r/2) -1.84840e+00 5.16968e-01 3.6 *
4 r^0·exp(-r/4) 3.16612e-02 1.45463e-01 0.2 ·
5 r^1·exp(-r/0.5) 4.37969e+00 3.73906e+00 1.2 ·
6 r^1·exp(-r/1) 2.38924e+00 4.90655e-01 4.9 *
7 r^1·exp(-r/2) 1.11856e-01 4.70822e-02 2.4 *
8 r^1·exp(-r/4) -2.23570e-02 1.33291e-02 1.7 ·
9 g·r^0·exp(-r/0.5) -4.35410e+01 3.46116e+00 12.6 **
10 g·r^0·exp(-r/1) 2.50350e+01 4.92693e+00 5.1 *
11 g·r^0·exp(-r/2) 2.55251e+01 4.97670e-01 51.3 **
12 g·r^0·exp(-r/4) 3.83326e+00 8.76765e-02 43.7 **
13 g·r^1·exp(-r/0.5) -5.32409e+01 7.19212e+00 7.4 *
14 g·r^1·exp(-r/1) -3.07139e+01 1.00916e+00 30.4 **
15 g·r^1·exp(-r/2) -4.90880e+00 6.85575e-02 71.6 **
16 g·r^1·exp(-r/4) -1.75143e-01 8.78098e-03 19.9 **
──────────────────────────────────────────────────────────────────────────
17/17 basis functions in support, sig: 12* / 7** / 1*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
Force scatter: exact vs inferred¶
All force components (translational and angular) along the trajectory, plotted as a scatter. Points near the diagonal indicate good inference.
# The force is a multi-particle interacting field (per-frame neighbour
# structure + the ``box`` extra), so evaluate it per frame on ``coll.X``
# rather than via force_comparison_arrays (which flattens to single points).
Xe = proc.force_sf(coll.X, extras={"box": box})
Xi = inf.force_inferred(coll.X, extras={"box": box})
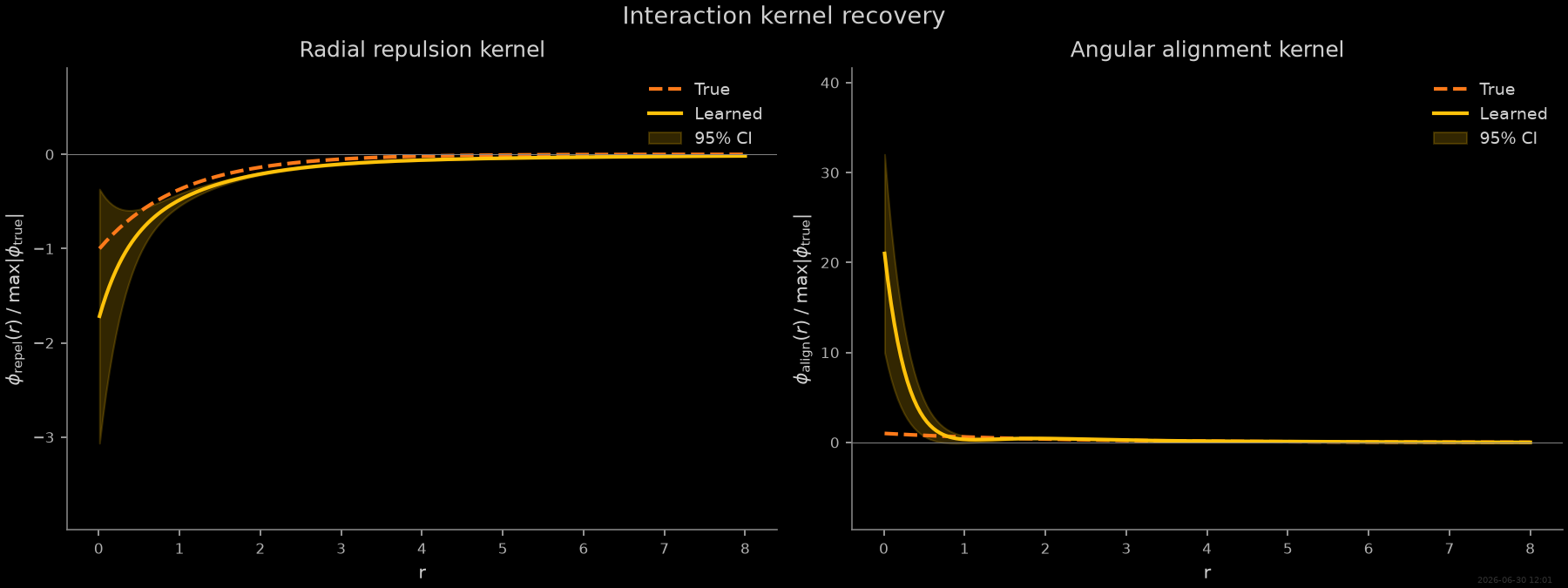
Recovered interaction kernels¶
The inferred coefficients weight the radial kernels. Summing
\(\sum_k c_k \phi_k(r)\) reconstructs the effective radial
interaction shape. Shaded bands show 95 % confidence intervals
derived from the coefficient covariance
(see kernel_predict_ci()).
from SFI.inference import kernel_predict_ci
# Extract inferred coefficients and covariance sub-blocks for each basis block
c_heading, _ = inf.coeff_block(B_heading, field='force')
c_repel, cov_repel = inf.coeff_block(B_repel, field='force')
c_align, cov_align = inf.coeff_block(B_align, field='force')
# True coefficient vectors in the generic-basis coordinate system
# Kernel ordering from exp_poly_kernels(degrees=[0,1], lengths=[0.5,1,2,4]):
# k=0: r⁰·e⁻ʳ/0.5 k=1: r⁰·e⁻ʳ/1 k=2: r⁰·e⁻ʳ/2 k=3: r⁰·e⁻ʳ/4
# k=4: r¹·e⁻ʳ/0.5 k=5: r¹·e⁻ʳ/1 k=6: r¹·e⁻ʳ/2 k=7: r¹·e⁻ʳ/4
idx_repel = 1 # r⁰·e⁻ʳ/R₀ with R₀=1.0
idx_align = 2 # sin(Δθ)·r⁰·e⁻ʳ/L₀ with L₀=2.0
true_c_repel = np.zeros(n_repel)
true_c_repel[idx_repel] = -eps_true
true_c_align = np.zeros(n_align)
true_c_align[idx_align] = A_true
# Compute kernel profiles with confidence intervals
r_eval = np.linspace(0.01, 8.0, 200)
ci_repel = kernel_predict_ci(r_eval, repel_kernels, c_repel, cov_repel)
ci_align = kernel_predict_ci(r_eval, align_kernels, c_align, cov_align)
# True kernel profiles (for comparison)
true_repel = true_c_repel @ ci_repel["phi"]
true_align = true_c_align @ ci_align["phi"]
Inferred self-propulsion¶
The heading coefficient recovers the active thrust magnitude \(c_0\):
Bootstrapped trajectory¶
Simulating from the inferred model and comparing emergent collective behaviour is a powerful qualitative validation for multi-particle systems.
# Run a bootstrap simulation from the inferred coefficients
key_boot = random.PRNGKey(seed + 77)
proc_boot = inf.simulate_bootstrapped_trajectory(key_boot, simulate=False)
proc_boot.set_extras(extras_global={"box": box})
proc_boot.initialize(x0) # same initial conditions
key_boot, sub_boot = random.split(key_boot)
coll_boot = proc_boot.simulate(dt=dt_sim, Nsteps=Nsteps, key=sub_boot)
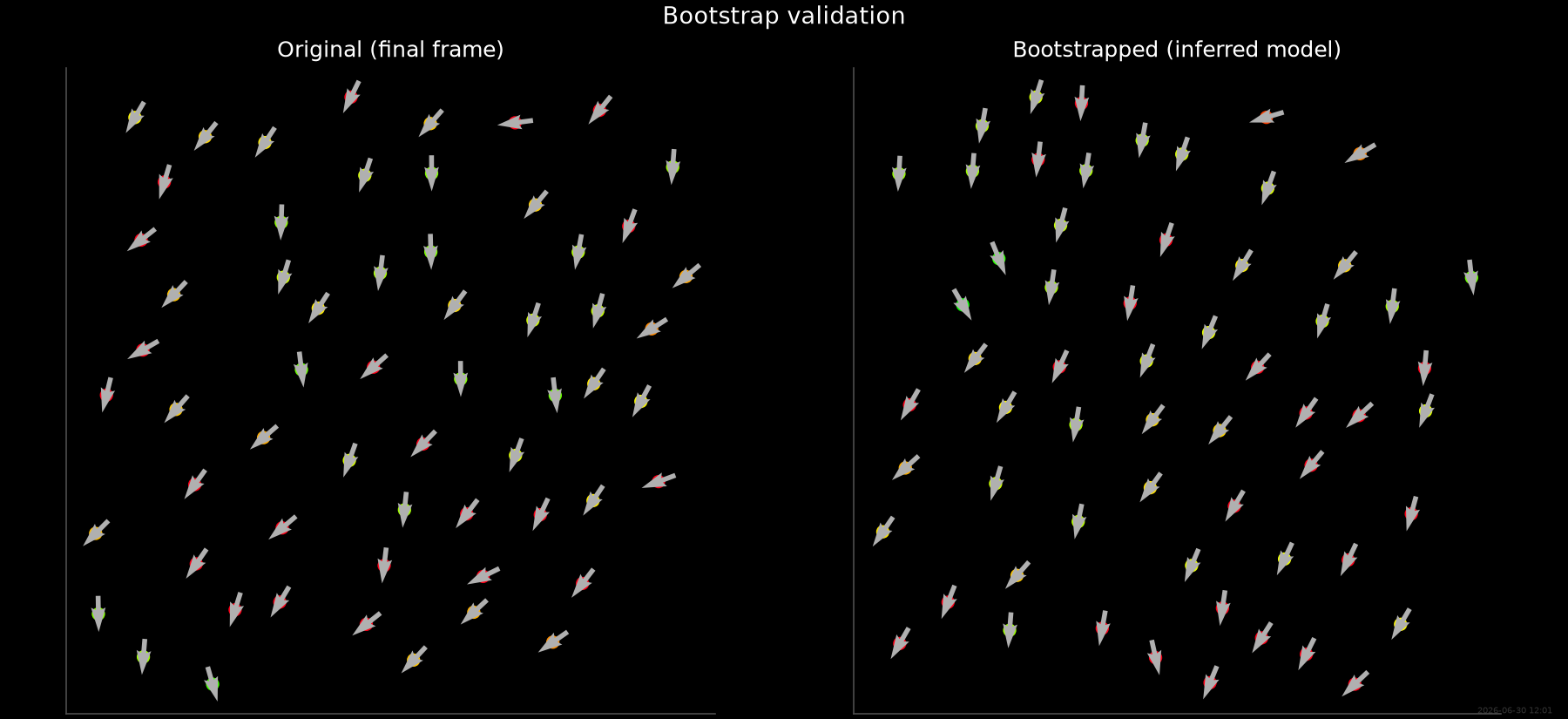
Bootstrap comparison movie¶
Side-by-side animation of the original trajectory (left) and a trajectory simulated from the inferred model (right). Both start from the same initial conditions.
Xboot_full = np.asarray(coll_boot.X)
Both simulations start from the same initial conditions. Visual similarity confirms the inferred model captures the collective dynamics.
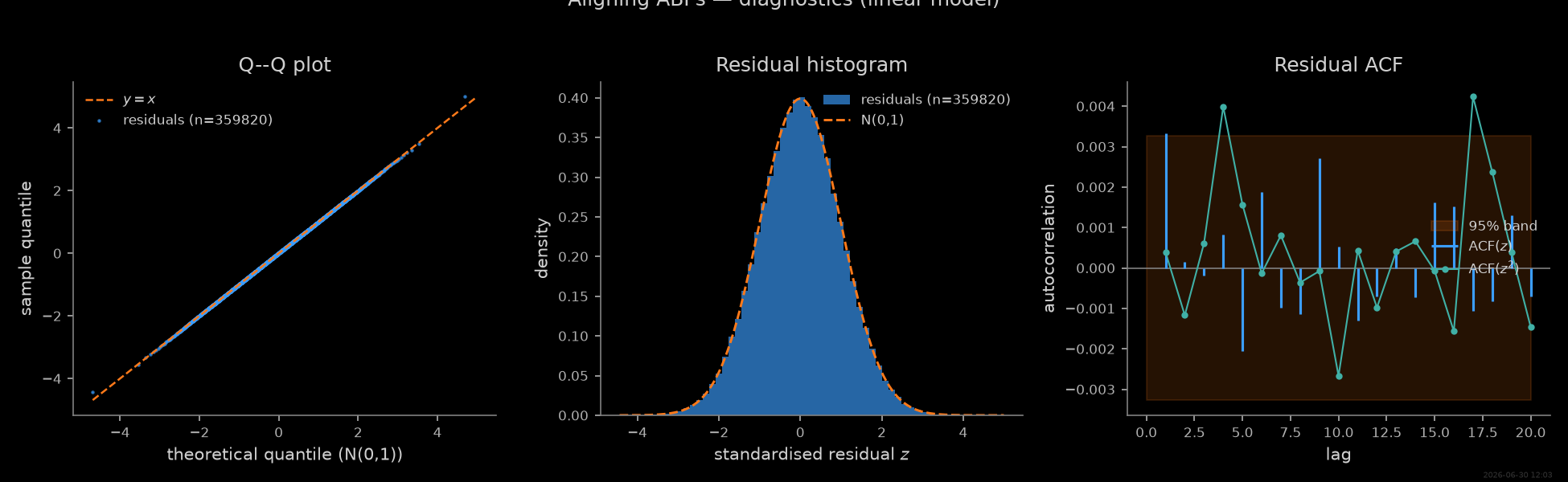
Diagnostics¶
assess() computes standardised Euler
residuals pooled across all particles and spatial components
(\(N_\mathrm{obs} \approx N_\mathrm{particles} \times T \times d\)),
giving high statistical power even from a short trajectory.
All three force channels — translational \((x,y)\) and angular
\((\theta)\) — are pooled into a single residual vector.
The linear basis is over-complete by design, so the NMSE should be small but the coefficient z-scores for unused kernels will be near zero.
from SFI.diagnostics import assess, plot_summary
report = assess(inf, level="standard")
report.print_summary()
=== SFI diagnostics report ===
backend : linear
regime : OD
n_obs : 119940 n_particles: 60 d: 3
level : standard
-- Residuals --
mean = +0.0003 std = 0.9988 skew = -0.005 kurt-3 = -0.000 (n=359820)
✓ normality ks stat=0.00143 p=0.454
✓ autocorr ljung_box stat=14.9 p=0.783
✓ autocorr ljung_box_squared stat=21 p=0.4
predicted NMSE = 0.000534 realised NMSE = 0 χ² z = -1.00 (|z|>5 ⇒ bias)
-- Flags --
(no issues at α = 0.01)
Thumbnail¶
Dedicated single-panel figure for the gallery thumbnail.
stamp_output()
examples/gallery/abp_align_demo.py:570: UserWarning: The figure layout has changed to tight
plt.tight_layout()
[Generated: 2026-06-30 12:03]
Total running time of the script: (3 minutes 24.697 seconds)