Note
Go to the end to download the full example code.
Getting started: end-to-end inference (Ornstein–Uhlenbeck)¶
This is the recommended starting point for new users: a complete, runnable Stochastic Force Inference (SFI) workflow on the simplest non-trivial system. Every step below is executed when the documentation is built, so the numbers and figures on this page are real output.
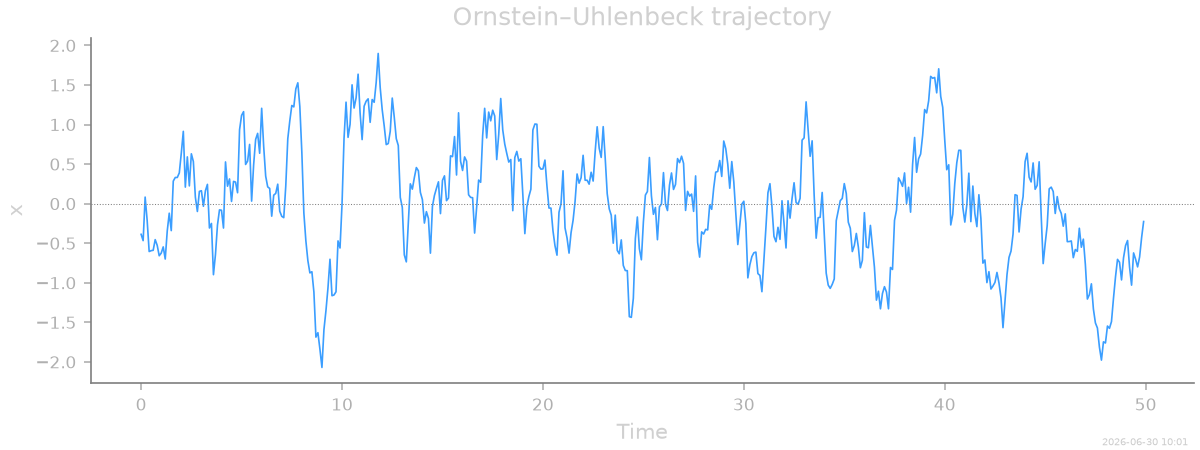
We work with a one-dimensional Ornstein–Uhlenbeck (OU) process — a particle in a harmonic trap. Its motion obeys the simplest overdamped Langevin equation,
a linear restoring force \(F(x) = -k\,x\) that pulls the particle back toward the origin, plus white noise whose strength is set by the diffusion constant \(D\). Because the force is linear and the noise constant, we know the exact answer in advance — which makes OU the ideal system for watching the method work.
Across this page we will:
simulate a trajectory from a known model;
estimate the diffusion constant and infer the force;
let SFI select the minimal model out of a deliberately over-complete basis;
validate the fit with residual diagnostics and a bootstrapped trajectory;
save the result to disk and load it back.
The whole workflow is a handful of method calls. Real experimental data follows the same path — you just load your trajectories instead of simulating them; see Experimental-data workflow template for that template.
Tags
synthetic · overdamped · linear · 1D
Simulate a trajectory¶
Before we can infer anything we need data. We build the exact OU
model and integrate it forward with
OverdampedProcess.
The force is the linear restoring law \(F(x) = -k\,x\), which we
write directly as -k_true * X(dim=1) — here X()
is the coordinate \(x\). The diffusion is a single constant,
D = 0.5.
import SFI
from SFI.langevin import OverdampedProcess
from SFI.bases import X
k_true = 1.0 # trap stiffness → F(x) = -k x
D_true = 0.5 # diffusion constant
dt = 0.1 # time between recorded frames
Nsteps = 500 # number of frames
proc = OverdampedProcess(F=-k_true * X(dim=1), D=D_true) # F(x) = -k·x
proc.initialize(jnp.array([0.0])) # start at the origin
key = random.PRNGKey(137)
coll = proc.simulate(dt=dt, Nsteps=Nsteps, key=key, oversampling=4)
print(f"Simulated {coll.T} frames at dt = {dt}")
Simulated 500 frames at dt = 0.1
The object returned by simulate()
is a TrajectoryCollection — the universal data
container in SFI. Everything downstream (inference, degradation,
bootstrapping) consumes a collection, whether it came from a simulation
or from a real recording loaded with from_arrays().
The trajectory shows the hallmark of a harmonic trap: the particle fluctuates around the origin, repeatedly pulled back by the restoring force.
Set up inference and estimate the diffusion¶
Inference runs through an engine built from the data — here
OverdampedLangevinInference. The first quantity to pin
down is the diffusion constant, which sets the noise scale and
weights the force regression.
Our data is clean and free of measurement noise, so we use the plain
mean-squared-displacement estimator, method="MSD", which is exact
in the fine-sampling limit. On real recordings with localization
noise, drop the argument: the default method="auto" then selects a
noise-robust estimator instead (see
Measurement noise and coarse sampling).
Note
More broadly, this tutorial uses SFI’s linear estimators
throughout — the right choice for clean, finely-sampled data. For
measurement noise, coarse sampling, or models nonlinear in their
parameters, switch to the parametric estimators (infer_force()
/ infer_diffusion()); the regime table in
Choosing an estimator tells you when.
inf = SFI.OverdampedLangevinInference(coll)
inf.compute_diffusion_constant(method="MSD")
Infer the force¶
Now the central step. In a real experiment we would not know that
the force is linear, so we hand SFI a generic, deliberately
over-complete library of candidate terms — the monomials
\(\{1,\,x,\,x^2\}\) — and let the data decide which it needs.
monomials_up_to() builds that basis; rank='vector'
makes each term a force component.
from SFI.bases import monomials_up_to
B = monomials_up_to(order=2, dim=1, rank="vector") # candidates: 1, x, x²
inf.infer_force_linear(B) # closed-form regression onto the basis
inf.compute_force_error() # predicted (sampling-noise) NMSE
inf.print_report()
--- StochasticForceInference Report ---
Average diffusion tensor:
[[0.5044536]]
Measurement noise tensor:
[[0.0043071]]
Force estimated information: 11.061005592346191
Force: estimated normalized mean squared error (sampling only): 0.13561157212196093
Force Coefficient Table
────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
────────────────────────────────────────────────────────────────
0 1·e0 4.52164e-02 1.83873e-01 0.2 ·
1 x0·e0 -9.68892e-01 2.06032e-01 4.7 *
2 x0^2·e0 -7.57193e-02 2.19615e-01 0.3 ·
────────────────────────────────────────────────────────────────
3/3 basis functions in support, sig: 1* / 0** / 0*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
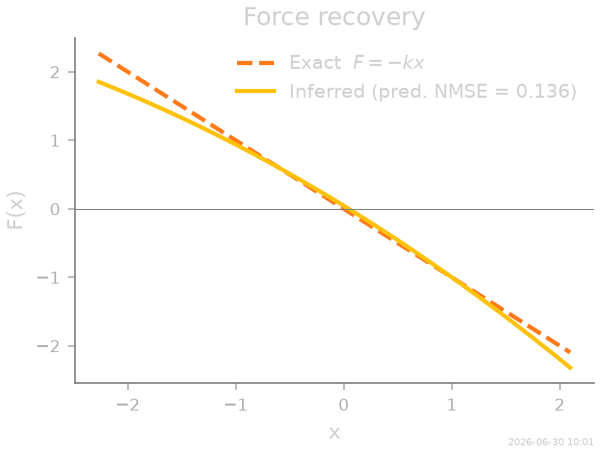
The report lists the fitted coefficients and a predicted normalized mean-squared error — SFI’s own estimate of how well the force is pinned down by this much data, available without any ground truth.
Because this is a synthetic benchmark we can check against the truth. The inferred force \(\hat F(x)\), with its 1-σ confidence band, overlays the exact \(F(x) = -k\,x\) almost perfectly.
x_jnp = jnp.array(np.linspace(Xarr.min() - 0.3, Xarr.max() + 0.3, 200)[:, None])
# capture the full-basis coefficients before model selection prunes them
coeffs_full = np.asarray(inf.force_coefficients_full)
stderr_full = np.asarray(inf.force_coefficients_stderr)
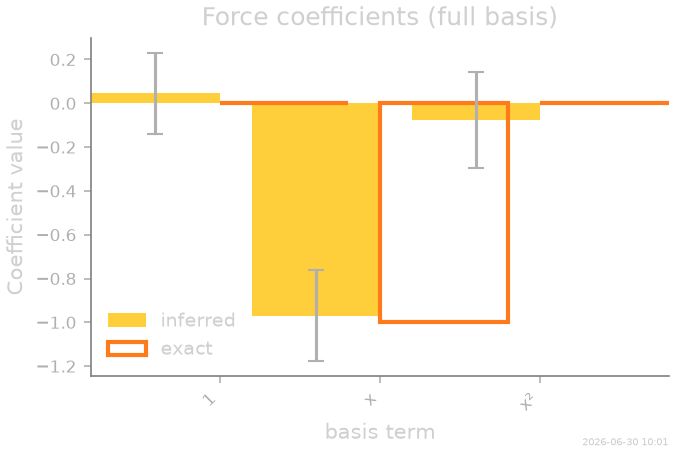
Which terms does the data support? Model selection¶
Our basis had three candidate terms, but only one — the linear term — is really present. Looking at the fitted coefficients with their 1-σ error bars already tells the story: the constant and quadratic terms are statistically indistinguishable from zero, while the linear coefficient sits squarely at \(-k\).
labels = ["1", "x", "x²"]
coeffs_exact = np.array([0.0, -k_true, 0.0])
Rather than read the bars by eye, let SFI make the choice.
sparsify_force() runs a model
search scored by an information criterion — the default is PASTIS,
SFI’s parsimonious criterion — and keeps only the terms the data
actually warrant.
inf.sparsify_force(criterion="PASTIS")
inf.compute_force_error()
inf.print_report()
--- StochasticForceInference Report ---
Average diffusion tensor:
[[0.5044536]]
Measurement noise tensor:
[[0.0043071]]
Force estimated information: 11.001898765563965
Force: estimated normalized mean squared error (sampling only): 0.045446697961144825
Force Coefficient Table
────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
────────────────────────────────────────────────────────────────
1 x0·e0 -9.62484e-01 2.05185e-01 4.7 *
────────────────────────────────────────────────────────────────
1/3 basis functions in support, sig: 1* / 0** / 0*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
Zeroed (2): 1·e0, x0^2·e0
PASTIS keeps the single linear term and discards the constant and quadratic — recovering the exact structure of the model, not just its values. Selecting the minimal model both sharpens the estimate and makes it interpretable: the answer is “a harmonic trap”, stated in one coefficient.
Consistency diagnostics¶
With real data there is no exact model to compare against, so the
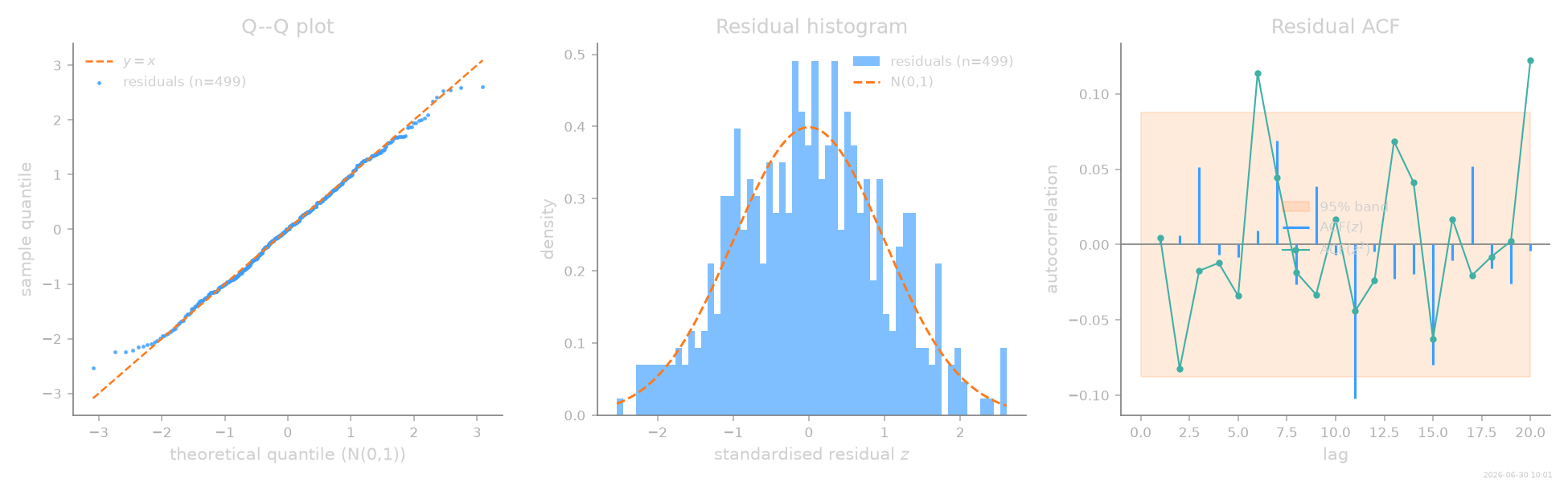
canonical sanity check is statistical. SFI recomputes the standardised
residuals
\(z_t = (\Delta x_t - \hat F(x_t)\,\Delta t)/\sqrt{2\hat D\,\Delta t}\)
and asks whether they look like independent \(\mathcal N(0,1)\)
draws. SFI.diagnostics.assess() (also reachable as
inf.diagnose()) runs a panel of tests and returns a report.
from SFI.diagnostics import assess, plot_summary
report = assess(inf, level="standard")
report.print_summary()
=== SFI diagnostics report ===
backend : linear
regime : OD
n_obs : 499 n_particles: 1 d: 1
level : standard
-- Residuals --
mean = +0.0015 std = 0.9768 skew = +0.037 kurt-3 = -0.329 (n=499)
✓ normality ks stat=0.0208 p=0.979
✓ autocorr ljung_box stat=16.1 p=0.711
✓ autocorr ljung_box_squared stat=27.5 p=0.121
predicted NMSE = 0.0454 realised NMSE = 0 χ² z = -0.75 (|z|>5 ⇒ bias)
-- Flags --
(no issues at α = 0.01)
A well-specified fit shows a pooled residual mean ≈ 0, standard deviation ≈ 1, no autocorrelation, normal tails, and a realised error consistent with the predicted one. Residual autocorrelation would point to missing dynamics; a standard deviation far from 1 to a mis-estimated diffusion. See the Diagnostics user guide for the full inventory.
Bootstrapped trajectory¶
A second, dynamical check: simulate a new trajectory directly from the inferred model. If the fit is faithful, this bootstrap should be statistically indistinguishable from the original data — same spread, same relaxation. Inferred models are first-class simulators, so this is a single call.
key_boot = random.PRNGKey(0)
coll_boot, _ = inf.simulate_bootstrapped_trajectory(key_boot)
_, Xb_full, _ = coll_boot.to_arrays(dataset=0)
Xb = Xb_full[:, 0, 0] # bootstrapped x(t)
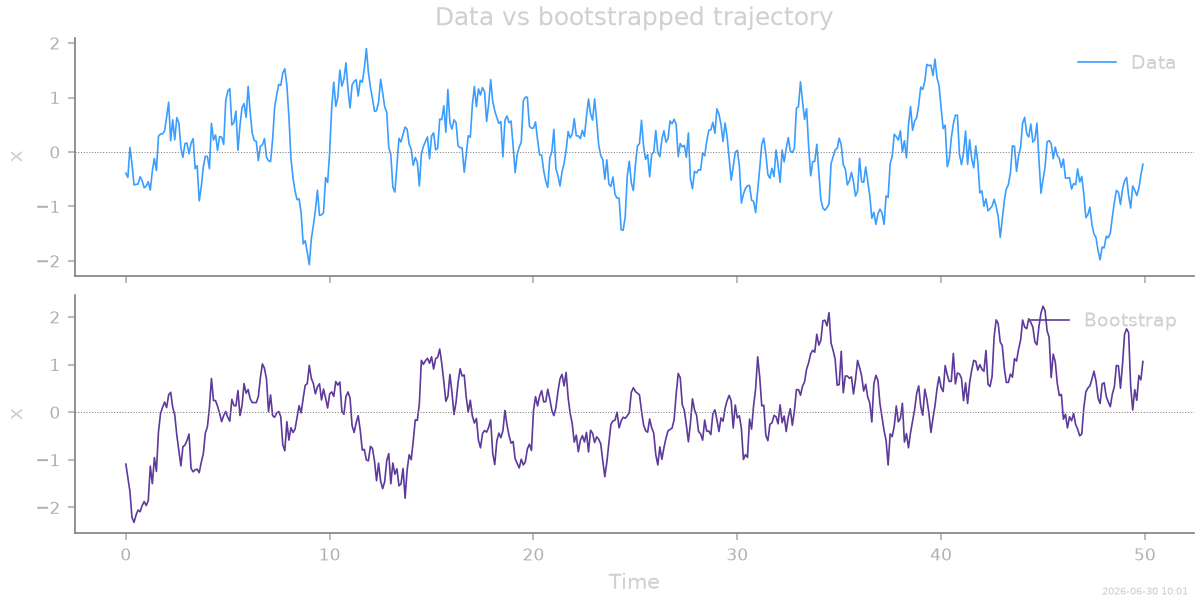
The trajectories look alike, but the sharper test is in statistics the
fit never used directly. SFI only sees short-time increments
\(\Delta x\) over one step dt; everything at longer lags — how
fast correlations decay, how far the particle wanders — is a genuine
prediction of the inferred model. Comparing those long-time
statistics between the data and a bootstrap is one of the most
informative consistency checks available without ground truth.
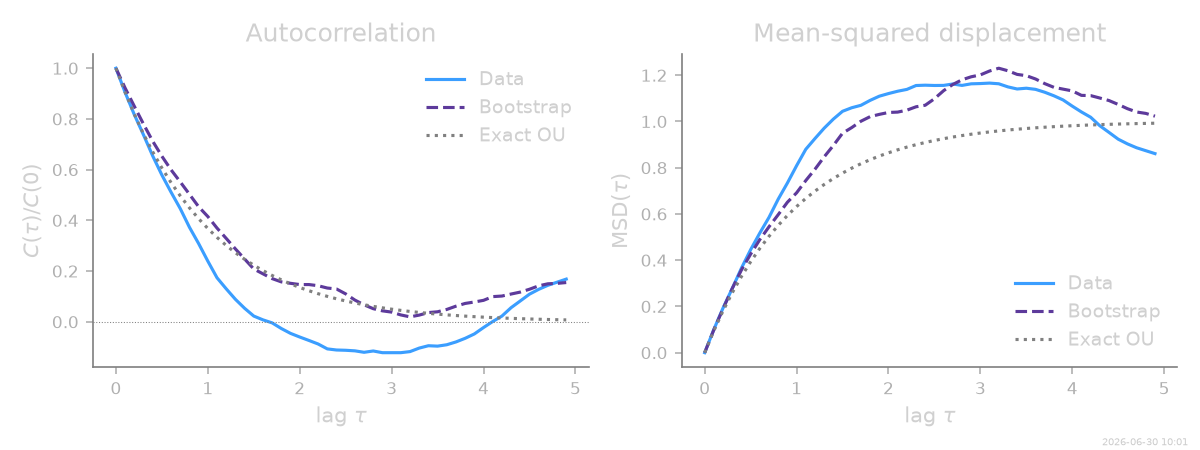
We look at two: the autocorrelation \(C(\tau) = \langle x(t)\,x(t+\tau)\rangle\) (how memory fades) and the mean-squared displacement \(\mathrm{MSD}(\tau) = \langle [x(t+\tau)-x(t)]^2\rangle\) (how far it spreads). For an OU process both are exact exponentials, drawn here as dotted references.
def acf(x, n_lags):
x = x - x.mean()
c = np.correlate(x, x, mode="full")[len(x) - 1:]
return c[:n_lags] / c[0]
def msd(x, n_lags):
return np.array([np.mean((x[k:] - x[:-k]) ** 2) if k else 0.0
for k in range(n_lags)])
n_lags = 50
lags = np.arange(n_lags) * dt
acf_data, acf_boot = acf(Xarr[:, 0], n_lags), acf(Xb, n_lags)
msd_data, msd_boot = msd(Xarr[:, 0], n_lags), msd(Xb, n_lags)
acf_exact = np.exp(-k_true * lags) # OU: C(τ)/C(0) = e^{-kτ}
msd_exact = 2 * (D_true / k_true) * (1 - np.exp(-k_true * lags))
#
# Data and bootstrap track each other and the exact OU curves across all
# lags: the inferred short-time force and diffusion reproduce the
# emergent long-time behaviour the fit never saw directly.
examples/gallery/ou_demo.py:346: UserWarning: The figure layout has changed to tight
plt.tight_layout()
Save and load¶
Finally, persist the result. SFI offers two complementary serializers:
save_results()writes a lightweight summary (coefficients, errors, metadata) as.npz+.json;save_model()writes the fitted callable model so the inferred force can be re-evaluated later. Reloading it needs a template that supplies the basis structure (the dictionary of functions is not pickled).
We write to a temporary directory here to keep the example self-contained.
import os
import tempfile
from SFI.inference import load_model, load_results, save_model, save_results
tmp = tempfile.mkdtemp()
# 1. lightweight summary
save_results(inf, os.path.join(tmp, "ou_inference"))
summary = load_results(os.path.join(tmp, "ou_inference"))
print("Reloaded summary keys:", sorted(summary)[:5], "...")
# 2. the callable force model
save_model(inf.force_inferred, os.path.join(tmp, "ou_force"))
force_reloaded = load_model(os.path.join(tmp, "ou_force"),
template=inf.force_inferred)
# the reloaded model evaluates to the same force
max_diff = float(np.max(np.abs(
np.asarray(force_reloaded(x_jnp)) - np.asarray(inf.force_inferred(x_jnp))
)))
print(f"Reloaded model matches original (max |Δ| = {max_diff:.2e})")
Reloaded summary keys: ['Lambda', '_sfi_version', 'diffusion_average', 'force_coefficients', 'force_coefficients_full'] ...
Reloaded model matches original (max |Δ| = 0.00e+00)
Next steps¶
That is the full arc — simulate, infer, select, validate, persist — in a few dozen lines. Where to go next:
Real experimental data follows the identical workflow; you skip the “exact model” comparison and lean on diagnostics and bootstrapping for validation. Start from Start here: is SFI right for my data? for the routing guide, then use Experimental-data workflow template as the template.
Noisy or coarsely-sampled recordings need the parametric estimators — see Measurement noise and coarse sampling.
Building models (custom bases, interactions, masking): Models and state functions and Building bases.
Trajectory I/O (loading CSV/Parquet/HDF5, multi-experiment data): Trajectory data.
Inference in depth (overdamped vs. underdamped, diffusion methods, error analysis): Running inference.
stamp_output()
[Generated: 2026-06-30 10:01]
Total running time of the script: (0 minutes 17.805 seconds)