Note
Go to the end to download the full example code.
Lorenz attractor — overdamped inference¶
Infer the force field of a 3D Lorenz system from a single simulated trajectory using polynomial basis functions.
This example demonstrates the full SFI workflow on a classic chaotic system: simulate → infer → sparsify → validate → bootstrap.
Tags
synthetic · overdamped · nonlinear · sparsity · 3D · benchmark
System definition¶
The classic chaotic Lorenz system:
with \((\sigma, \rho, \beta) = (20, 8, 2)\), i.e. closer to the critical point than the classic parameters. We add isotropic noise \(D_0 = 5\) and simulate a short trajectory.
from SFI.bases import named_scalars, unit_axes, x_components
from SFI.langevin import OverdampedProcess
from SFI.utils import plotting
# Ground-truth Lorenz force, written directly as a symbolic composition
# of the basis primitives (no ``make_sf``, no raw array math). Named
# scalars carry the reference parameter values as defaults, so the
# simulator can bind them automatically.
x, y, z = x_components(3)
ex, ey, ez = unit_axes(3)
sigma_p, rho_p, beta_p = named_scalars(sigma=20.0, rho=8.0, beta=2.0)
F_true = (
(sigma_p * (y - x)) * ex
+ (x * (rho_p - z) - y) * ey
+ (x * y - beta_p * z) * ez
)
D0 = 5.0
dt = 0.005
Nsteps = 2000
seed = 0
key = random.PRNGKey(seed)
proc = OverdampedProcess(F_true, D=jnp.eye(3) * D0)
proc.initialize(jnp.array([1.0, 1.0, 1.0], dtype=jnp.float32))
key, sub = random.split(key)
coll = proc.simulate(dt=dt, Nsteps=Nsteps, key=sub, prerun=2000, oversampling=10)
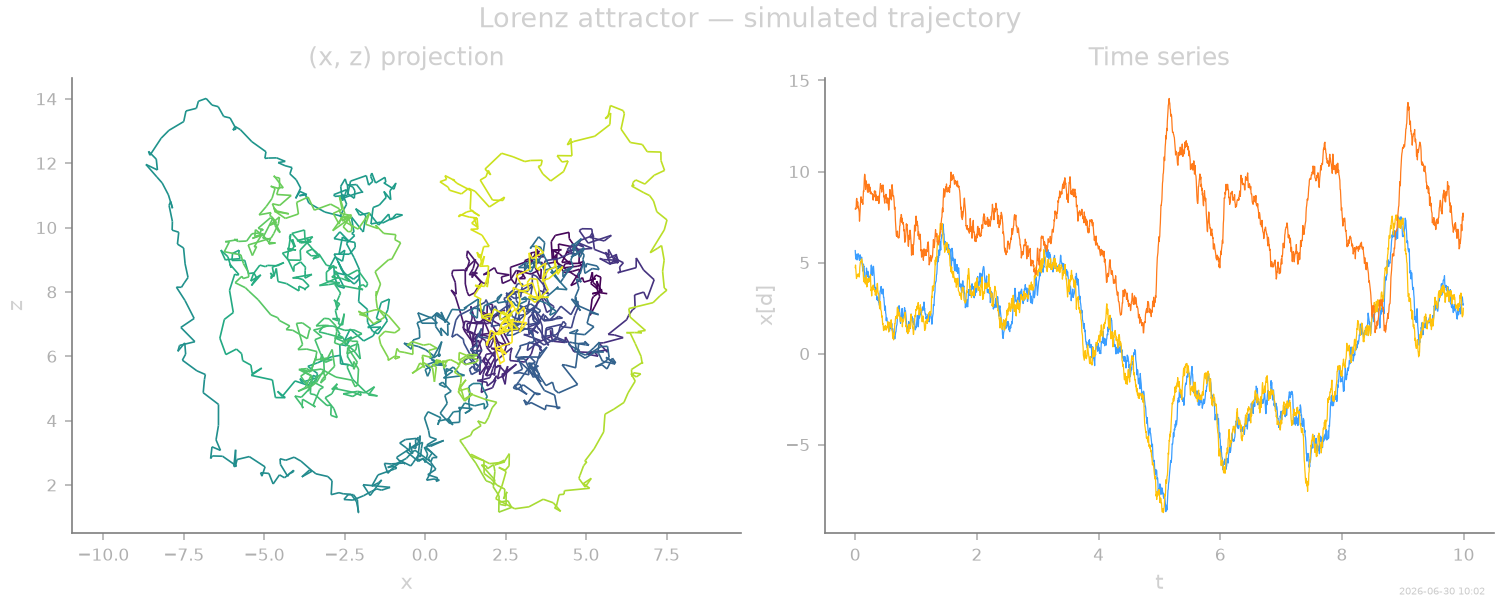
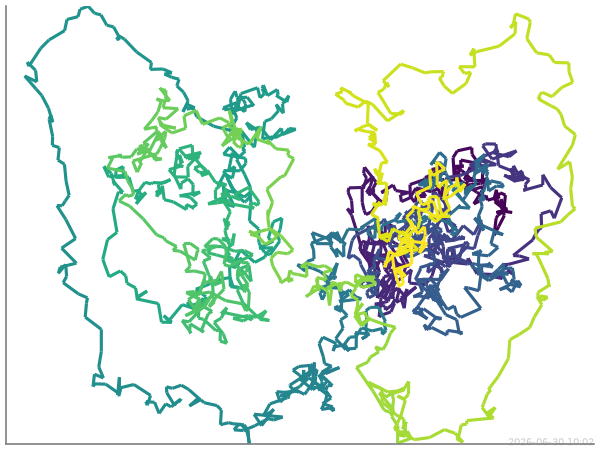
Trajectory¶
The characteristic butterfly structure is visible even on a short, noisy trajectory.
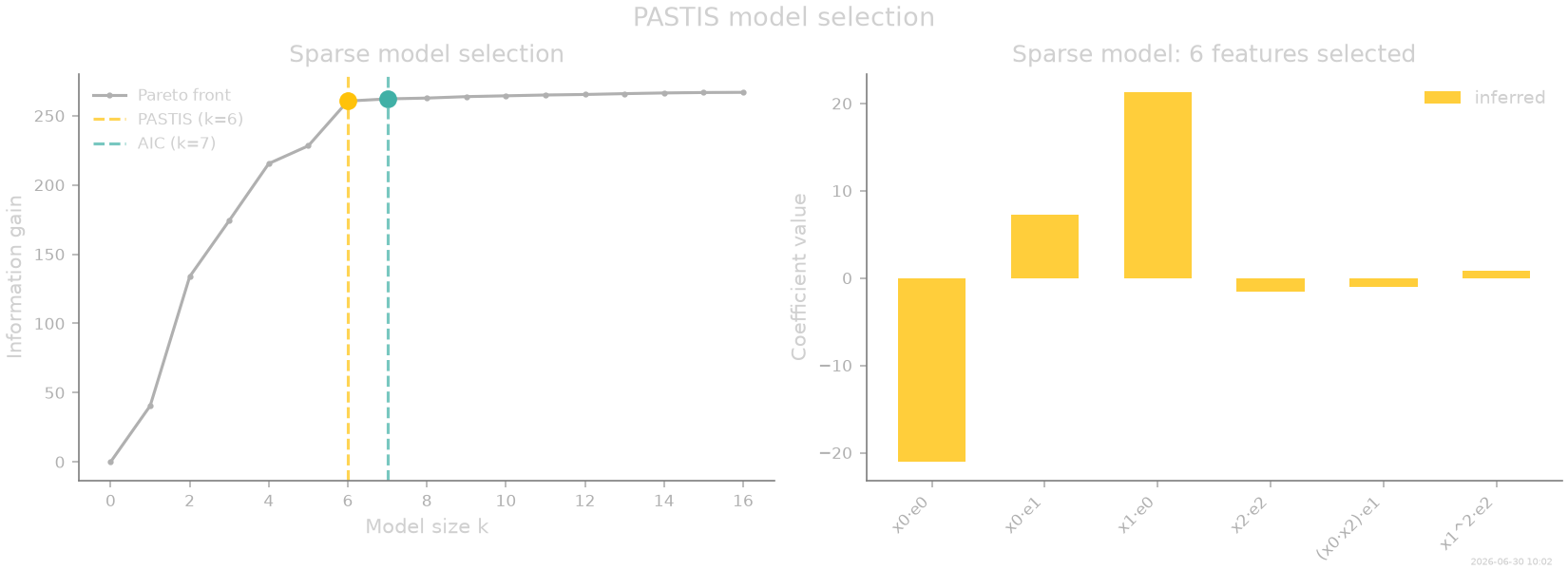
Inference and sparsification¶
A degree-2 polynomial basis in 3D gives 30 features. PASTIS sparsification recovers the 7-term Lorenz model.
from SFI.bases import monomials_up_to
from SFI import OverdampedLangevinInference
degree = 2
B = monomials_up_to(order=degree, dim=3, rank='vector')
inf = OverdampedLangevinInference(coll)
inf.compute_diffusion_constant(method="auto")
inf.infer_force_linear(B, M_mode="Ito", G_mode="trapeze")
inf.compute_force_error()
inf.sparsify_force(criterion="PASTIS")
inf.compute_force_error()
inf.compare_to_exact(model_exact=proc, maxpoints=2000)
inf.print_report()
--- StochasticForceInference Report ---
Average diffusion tensor:
[[ 4.915028 -0.09412182 0.08179999]
[-0.09412178 4.9277186 0.17238185]
[ 0.08179997 0.17238186 4.798985 ]]
Measurement noise tensor:
[[-0.00089405 -0.00341186 0.00121787]
[-0.00341186 -0.00330502 0.00119478]
[ 0.00121787 0.00119478 -0.00447237]]
Force estimated information: 260.56060791015625
Force: estimated normalized mean squared error (sampling only): 0.01151363418754868
Normalized MSE (force): 0.0250
Normalized MSE (diffusion): 0.0022
Force Coefficient Table
───────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
───────────────────────────────────────────────────────────────────
3 x0·e0 -2.10495e+01 1.30301e+00 16.2 **
4 x0·e1 7.26645e+00 9.01159e-01 8.1 *
6 x1·e0 2.12654e+01 1.31485e+00 16.2 **
11 x2·e2 -1.55772e+00 1.72741e-01 9.0 *
19 (x0·x2)·e1 -9.90525e-01 1.07576e-01 9.2 *
23 x1^2·e2 8.89709e-01 6.97303e-02 12.8 **
───────────────────────────────────────────────────────────────────
6/30 basis functions in support, sig: 6* / 3** / 0*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
Zeroed (24): 1·e0, 1·e1, 1·e2, x0·e2, x1·e1, x1·e2, x2·e0, x2·e1, x0^2·e0, x0^2·e1, x0^2·e2, (x0·x1)·e0, (x0·x1)·e1, (x0·x1)·e2, (x0·x2)·e0, (x0·x2)·e2, x1^2·e0, x1^2·e1, (x1·x2)·e0, (x1·x2)·e1, (x1·x2)·e2, x2^2·e0, x2^2·e1, x2^2·e2
Pareto front and sparse model¶
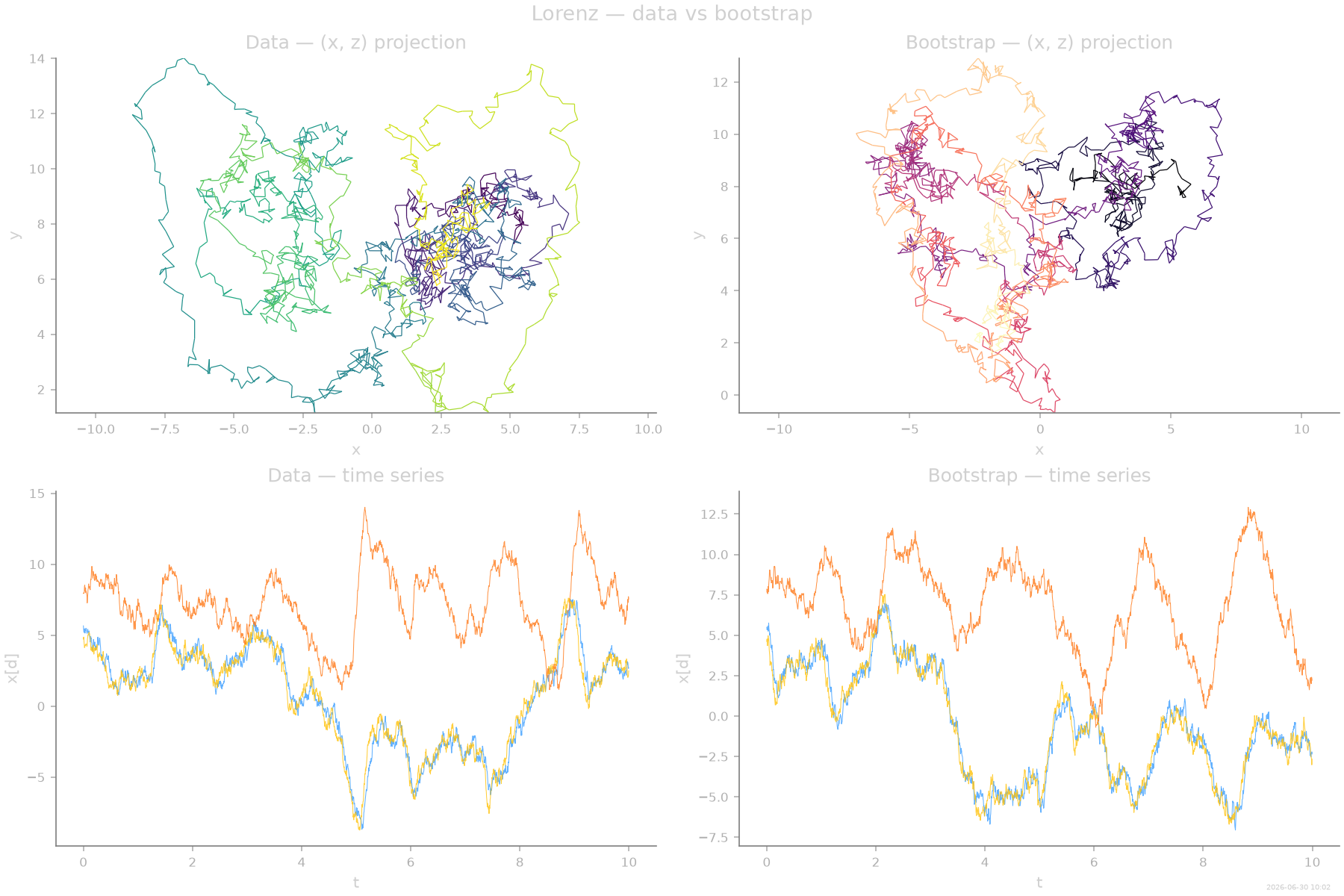
Bootstrap trajectory¶
Generate a bootstrapped trajectory from the inferred sparse model.
key_boot = random.PRNGKey(seed + 99)
coll_boot, _ = inf.simulate_bootstrapped_trajectory(key_boot, oversampling=10)
Data vs bootstrap comparison¶
Phase-space projection and time series of the data (top) vs the bootstrapped trajectory (bottom), straight from the toolkit plotters on each collection.
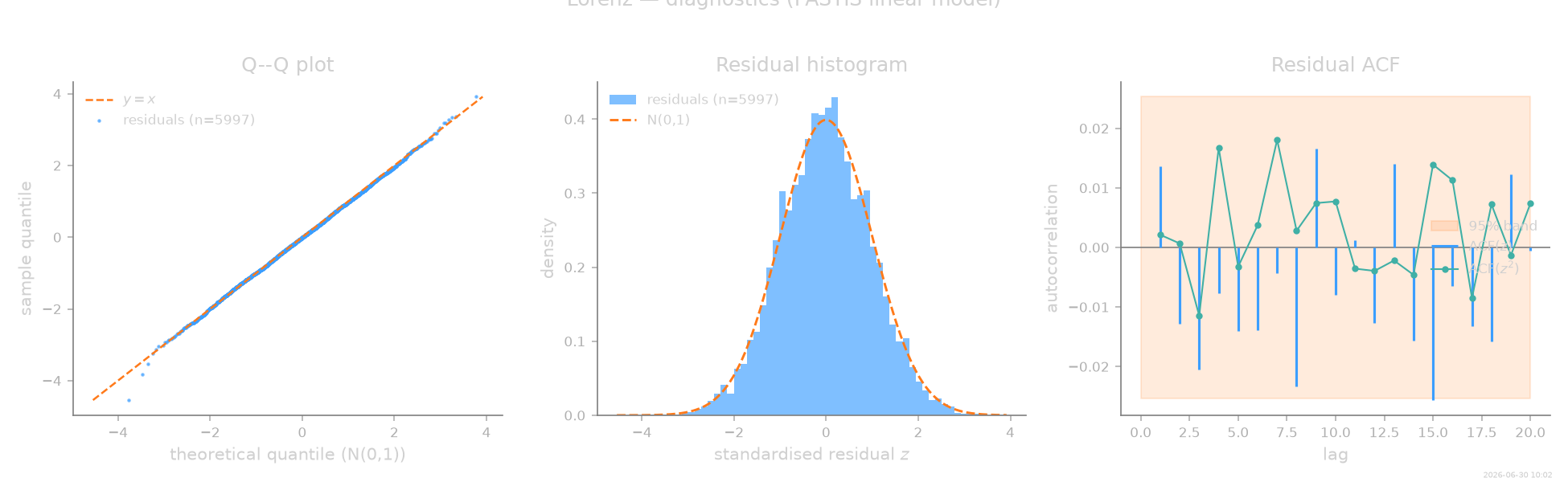
Diagnostics¶
Once a fit is in hand, assess() recomputes
standardised residuals
\(z_t = (\Delta x_t - \hat F(x_t)\,\Delta t)/\sqrt{2\hat D\,\Delta t}\)
and runs a panel of statistical tests. A well-specified model
should have residuals that are i.i.d. \(\mathcal{N}(0,1)\) —
no autocorrelation, no excess kurtosis, and a realised NMSE
consistent with the predicted (sampling-noise) value.
Here we diagnose the PASTIS-selected linear model (Itô estimator).
from SFI.diagnostics import assess, plot_summary
report = assess(inf, level="standard")
report.print_summary()
=== SFI diagnostics report ===
backend : linear
regime : OD
n_obs : 1999 n_particles: 1 d: 3
level : standard
-- Residuals --
mean = -0.0120 std = 0.9882 skew = +0.001 kurt-3 = +0.098 (n=5997)
✓ normality ks stat=0.0131 p=0.25
✓ autocorr ljung_box stat=24.1 p=0.239
✓ autocorr ljung_box_squared stat=8.68 p=0.986
predicted NMSE = 0.0115 realised NMSE = 0 χ² z = -1.29 (|z|>5 ⇒ bias)
-- Flags --
(no issues at α = 0.01)
Thumbnail¶
stamp_output()
[Generated: 2026-06-30 10:02]
Total running time of the script: (0 minutes 23.772 seconds)