Note
Go to the end to download the full example code.
Van der Pol oscillator — underdamped inference¶
Infer the force field of a 1D Van der Pol oscillator from position-only data. Velocities are reconstructed internally by the ULI estimators.
This example demonstrates underdamped Langevin inference: the system has inertia, but only positions are observed — as is typical for experimental tracking data.
Tags
synthetic · underdamped · nonlinear · 1D
System definition¶
The Van der Pol oscillator:
with \(\mu = 3\) (strongly nonlinear) and \(D_0 = 0.05\). We use a time step \(\Delta t = 5 \times 10^{-3}\) and a long trajectory to capture ~10 complete oscillation cycles.
from SFI.bases import named_scalar, unit_axes, v_components, x_components
from SFI.langevin import UnderdampedProcess
from SFI.utils import plotting
mu = 3.0
D0 = 0.05
dt = 0.02
Nsteps = 2000
oversampling = 8 # fine substeps → accurate Verlet integration of the SDE
seed_data = 0
# Ground-truth force written compositionally:
# F(x, v) = mu * (1 - x²) * v - x
# Named scalar carries the reference value as a default, so the
# simulator binds the parameter automatically.
(_x,) = x_components(1)
(_v,) = v_components(1)
(_ex,) = unit_axes(1)
mu_p = named_scalar("mu", default=mu)
F_exact = (mu_p * (1 - _x * _x) * _v - _x) * _ex
key = random.PRNGKey(seed_data)
proc = UnderdampedProcess(F_exact, D=jnp.array([[D0]]))
proc.initialize(jnp.array([1.0]), v0=jnp.array([0.0]))
key, sub = random.split(key)
coll = proc.simulate(dt=dt, Nsteps=Nsteps, key=sub, prerun=200, oversampling=oversampling)
t, X, _ = coll.to_arrays(dataset=0) # t:(T,), X:(T, N, d)
x = X[:, 0, 0]
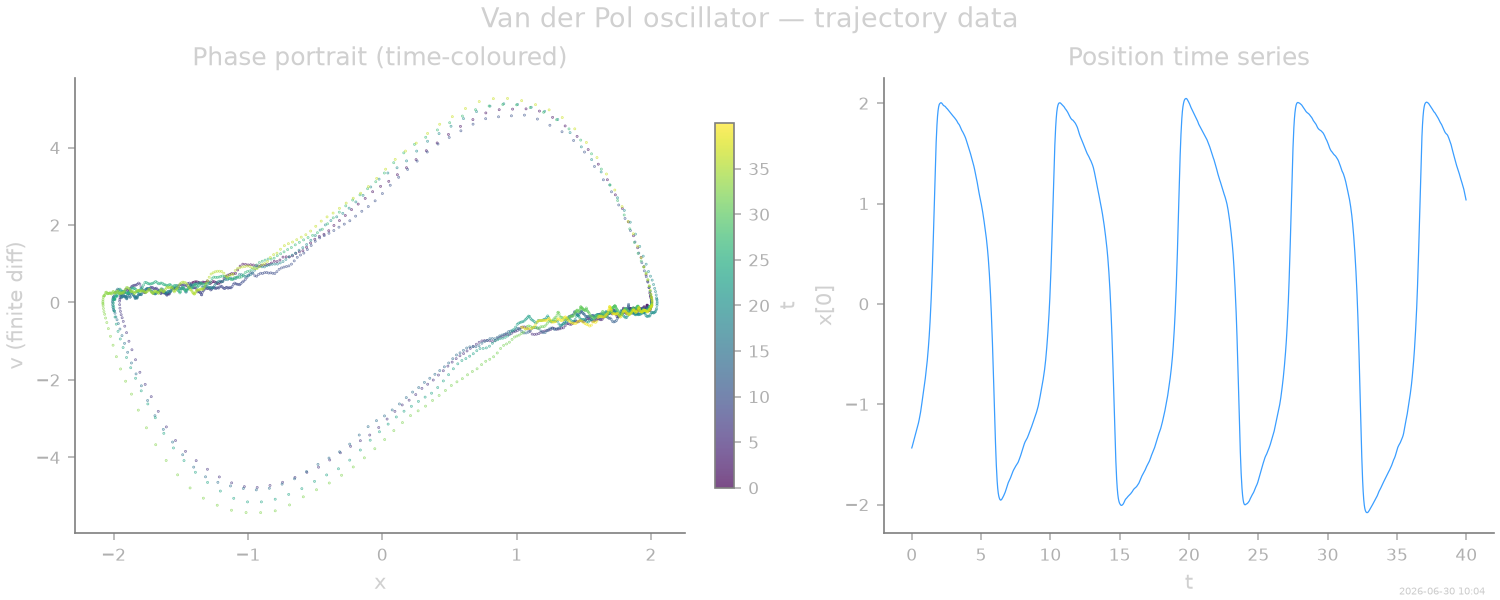
Phase portrait¶
The Van der Pol limit cycle in the \((x, \dot{x})\) plane. Velocities are estimated via finite differences for visualisation; the inference engine uses more sophisticated ULI reconstructions.
Force inference¶
Monomials in \((x, v)\) up to degree 3 capture the cubic
nonlinearity. UnderdampedLangevinInference handles velocity
reconstruction, diffusion estimation, and force projection.
from SFI.bases import monomials_up_to
from SFI import UnderdampedLangevinInference
degree = 3
B = monomials_up_to(order=degree, dim=1, include_v=True, rank='vector')
inf = UnderdampedLangevinInference(coll)
inf.compute_diffusion_constant()
# Default preset="auto": this trajectory is clean (Lambda_trace < 0), so the
# auto switch selects the sharper "clean"/WeakNoise estimator on its own.
inf.infer_force_linear(B)
inf.compute_force_error()
inf.compare_to_exact(model_exact=proc, data_exact=coll, maxpoints=2000)
inf.print_report()
--- StochasticForceInference Report ---
Average diffusion tensor:
[[0.05549547]]
Measurement noise tensor:
[[-4.8412693e-07]]
Force estimated information: 4455.1044921875
Force: estimated normalized mean squared error (sampling only): 0.001122307275636466
Normalized MSE (force): 0.0229
Normalized MSE (diffusion): 0.0098
Force Coefficient Table
─────────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
─────────────────────────────────────────────────────────────────────
0 1·e0 -2.44047e-01 1.78127e-01 1.4 ·
1 x0·e0 -9.87828e-01 1.56945e-01 6.3 *
2 v0·e0 4.52392e+00 1.58589e-01 28.5 **
3 x0^2·e0 1.18769e-01 5.85006e-02 2.0 *
4 (x0·v0)·e0 -4.98457e-02 6.97995e-02 0.7 ·
5 v0^2·e0 1.80063e-02 2.03494e-02 0.9 ·
6 x0^3·e0 -1.16508e-01 4.68651e-02 2.5 *
7 (x0^2·v0)·e0 -4.26904e+00 1.00399e-01 42.5 **
8 (x0·v0^2)·e0 5.84279e-01 5.35458e-02 10.9 **
9 v0^3·e0 -1.27913e-01 1.23059e-02 10.4 **
─────────────────────────────────────────────────────────────────────
10/10 basis functions in support, sig: 7* / 4** / 0*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
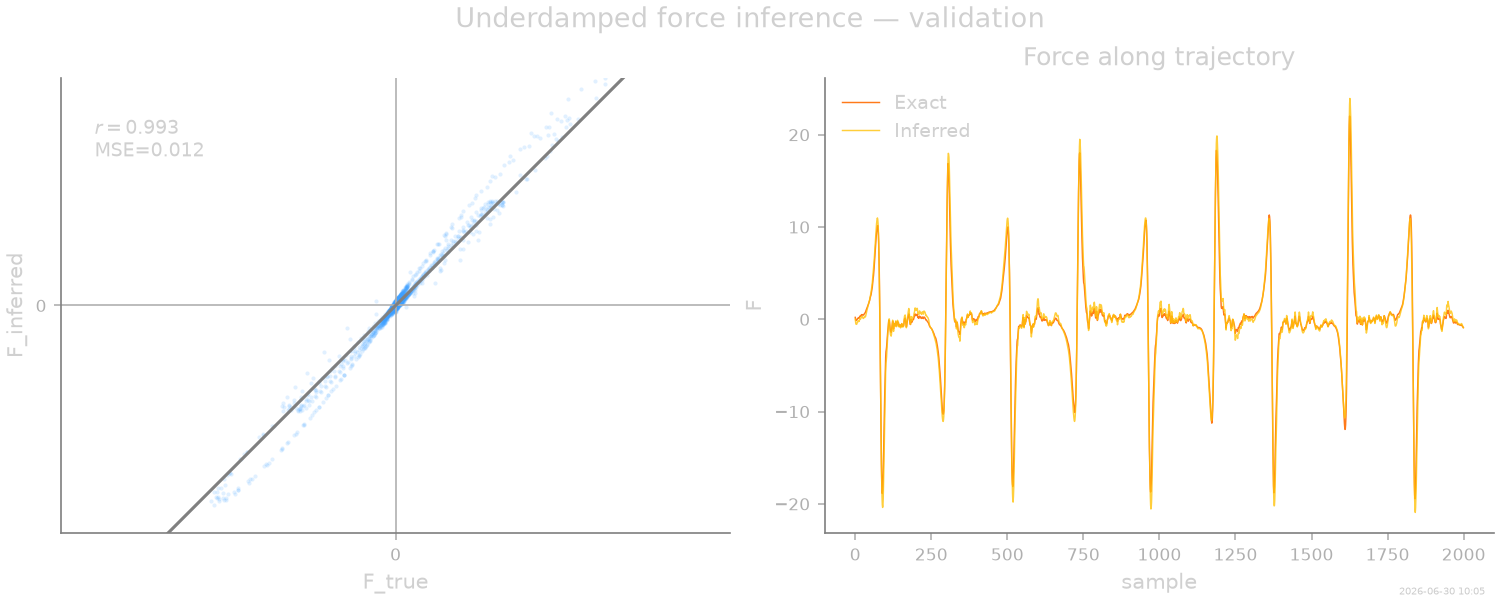
Force validation¶
Scatter plot of exact vs inferred force, evaluated along the ULI-reconstructed trajectory.
F_true, F_pred = inf.force_comparison_arrays(model_exact=proc)
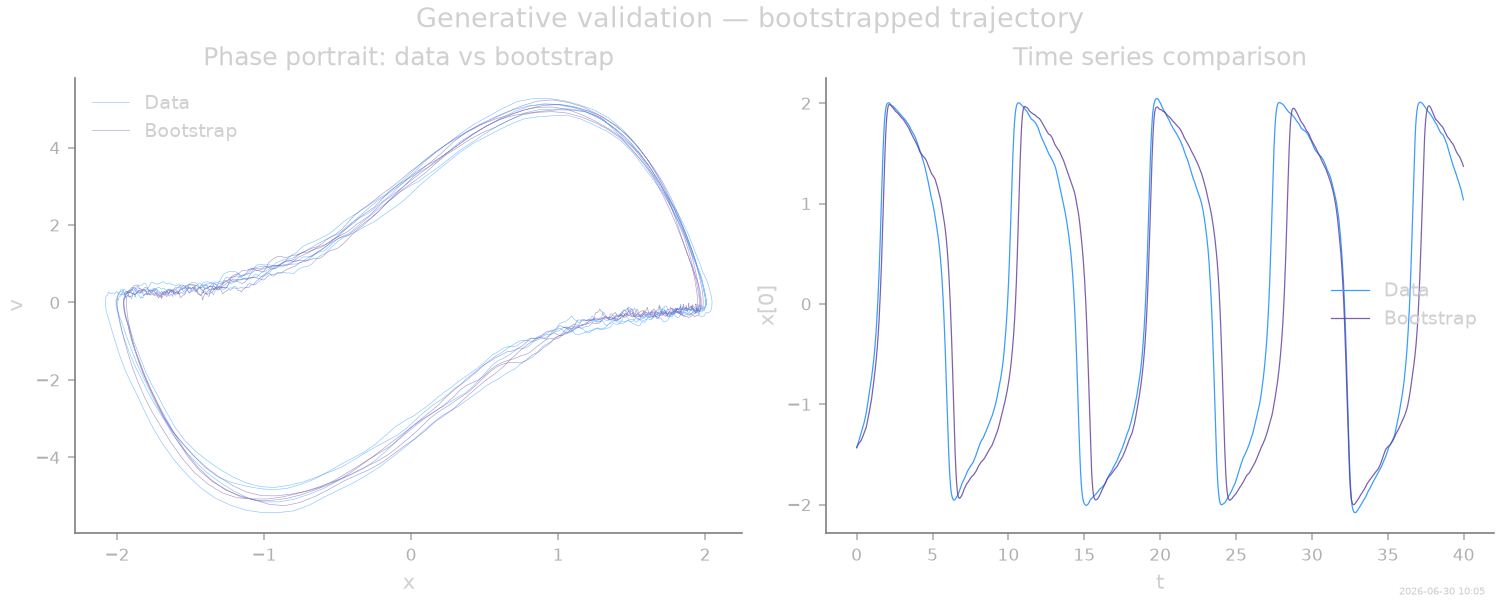
Bootstrapped trajectory¶
Simulating from the inferred model and comparing the phase portrait provides a generative validation.
key_boot = random.PRNGKey(1)
coll_boot, _ = inf.simulate_bootstrapped_trajectory(
key_boot, oversampling=oversampling, simulate=True
)
_, X_boot, _ = coll_boot.to_arrays(dataset=0)
x_boot = X_boot[:, 0, 0]
v_fd_boot = coll_boot.velocity_array(dataset=0, scheme="central")[:, 0, 0]
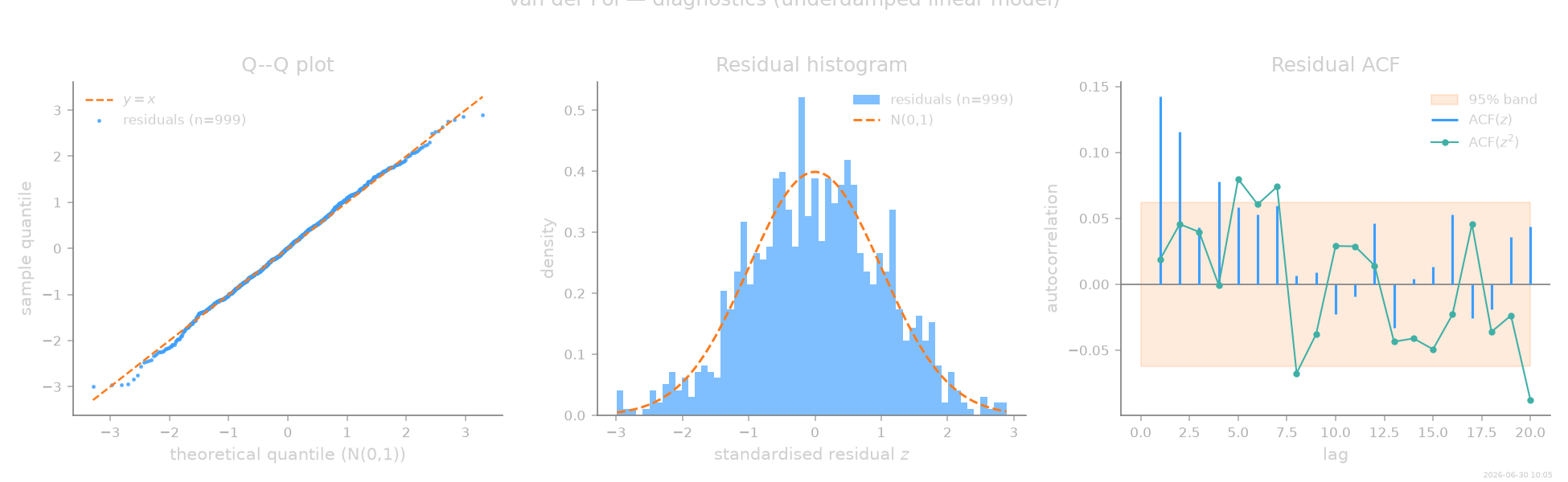
Diagnostics¶
The underdamped residual compares the symmetric finite-difference acceleration \(\hat a = (x_{t+1} - 2x_t + x_{t-1})/\Delta t^2\) (the same kinematic the force estimator fits) to the inferred force \(\hat F(\hat x, \hat v)\), standardised by the noise scale of a second difference of integrated white noise, \(\tfrac23\,(2\hat D)/\Delta t\). Adjacent accelerations overlap, so every second sample is used to keep the residuals independent. A well-specified cubic-in-\((x,v)\) model then passes all checks.
from SFI.diagnostics import assess, plot_summary
report = assess(inf, level="standard")
report.print_summary()
=== SFI diagnostics report ===
backend : linear
regime : UD
n_obs : 999 n_particles: 1 d: 1
level : standard
-- Residuals --
mean = +0.0221 std = 1.0195 skew = -0.071 kurt-3 = -0.129 (n=999)
✓ normality ks stat=0.0294 p=0.347
✗ autocorr ljung_box stat=62.9 p=2.54e-06
✗ autocorr ljung_box_squared stat=46.1 p=0.00078
predicted NMSE = 0.00112 realised NMSE = 0.00534 χ² z = +0.87 (|z|>5 ⇒ bias)
-- Flags --
! [autocorr/ljung_box] p=2.54e-06 < 0.01 — missing time-correlated feature — widen the basis; if it persists, suspect coarse sampling: the parametric estimator (infer_force) extends the usable Δt
! [autocorr/ljung_box_squared] p=7.80e-04 < 0.01 — diffusion mis-estimated or state-dependent — try the other compute_diffusion_constant method or a state-dependent diffusion basis; the parametric estimators profile (D, Λ)
Thumbnail¶
stamp_output()
[Generated: 2026-06-30 10:05]
Total running time of the script: (0 minutes 17.277 seconds)