Note
Go to the end to download the full example code.
2D limit cycle — nonlinear overdamped inference¶
Infer the force field of a 2D nonlinear system with a stable limit cycle. The radial force \(\dot{r} = r(1 - r^2)\) drives the system to a unit circle, while an angular drift \(\dot{\theta} = \omega\) generates rotation — a non-equilibrium steady state with non-zero probability currents.
Tags
synthetic · overdamped · nonlinear · non-equilibrium · 2D
System definition¶
In Cartesian coordinates the force is:
with angular frequency \(\omega = 2\) and isotropic noise \(D = 0.1\).
from SFI.bases import named_scalars, ones_basis, unit_axes, x_components
from SFI.langevin import OverdampedProcess
# Ground-truth force written compositionally:
# F = (1 - r^2) (x e_x + y e_y) + omega (x e_y - y e_x)
# with r^2 = x^2 + y^2. ``named_scalars`` holds ``omega`` with a
# default value so the simulator can bind parameters automatically.
x, y = x_components(2)
ex, ey = unit_axes(2)
one = ones_basis(2)
(omega_p,) = named_scalars(omega=2.0)
r2 = x * x + y * y
F_true = (one - r2) * (x * ex + y * ey) + omega_p * (x * ey - y * ex)
D0 = 0.1
dt = 0.05
Nsteps = 4_000
seed = 0
proc = OverdampedProcess(F_true, D=jnp.eye(2) * D0)
proc.initialize(jnp.array([0.5, 0.0]))
key = random.PRNGKey(seed)
coll = proc.simulate(dt=dt, Nsteps=Nsteps, key=key, prerun=5000, oversampling=20)
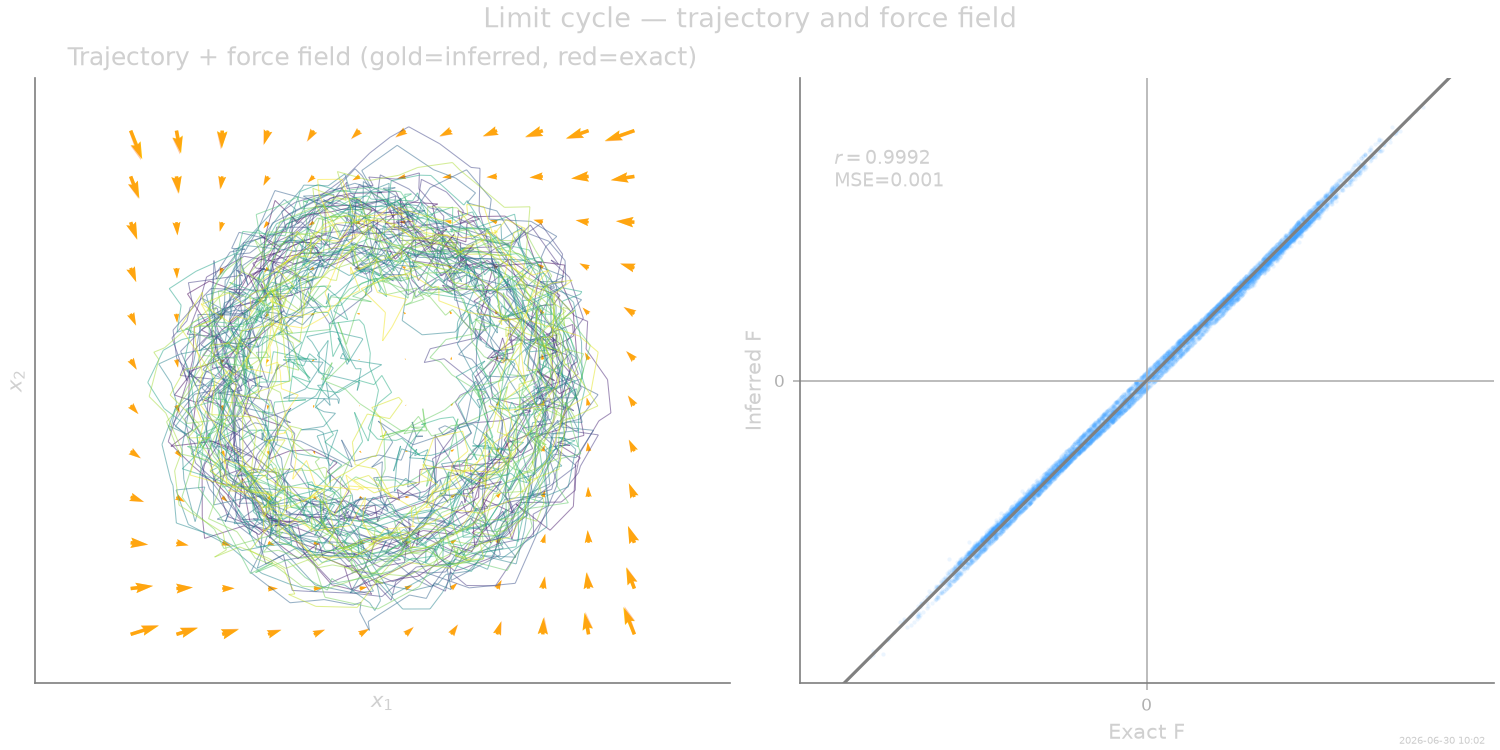
Trajectory and inferred force field¶
Build a polynomial basis, infer, sparsify with PASTIS, then overlay the inferred force field on the trajectory.
from SFI.bases import monomials_up_to
from SFI import OverdampedLangevinInference
from SFI.utils import plotting
degree = 3
B = monomials_up_to(order=degree, dim=2, include_constant=True, rank='vector')
inf = OverdampedLangevinInference(coll)
inf.compute_diffusion_constant()
inf.infer_force_linear(B, M_mode="Ito")
inf.compute_force_error()
inf.sparsify_force(criterion="PASTIS")
inf.compare_to_exact(model_exact=proc, maxpoints=2000)
inf.print_report()
--- StochasticForceInference Report ---
Average diffusion tensor:
[[ 0.1006882 -0.0014048 ]
[-0.0014048 0.10216548]]
Measurement noise tensor:
[[-0.00485671 -0.00024895]
[-0.00024895 -0.00476173]]
Force estimated information: 2099.39599609375
Force: estimated normalized mean squared error (sampling only): 0.0047632734165367506
Normalized MSE (force): 0.0017
Normalized MSE (diffusion): 0.0004
Force Coefficient Table
─────────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
─────────────────────────────────────────────────────────────────────
2 x0·e0 1.13881e+00 1.45951e-01 7.8 *
3 x0·e1 2.03314e+00 1.47018e-01 13.8 **
4 x1·e0 -1.94517e+00 1.38036e-01 14.1 **
5 x1·e1 9.05424e-01 1.39045e-01 6.5 *
12 x0^3·e0 -1.02404e+00 1.19558e-01 8.6 *
15 (x0^2·x1)·e1 -1.03951e+00 1.52876e-01 6.8 *
16 (x0·x1^2)·e0 -1.14151e+00 1.55510e-01 7.3 *
19 x1^3·e1 -9.12634e-01 1.12635e-01 8.1 *
─────────────────────────────────────────────────────────────────────
8/20 basis functions in support, sig: 8* / 2** / 0*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
Zeroed (12): 1·e0, 1·e1, x0^2·e0, x0^2·e1, (x0·x1)·e0, (x0·x1)·e1, x1^2·e0, x1^2·e1, x0^3·e1, (x0^2·x1)·e0, (x0·x1^2)·e1, x1^3·e0
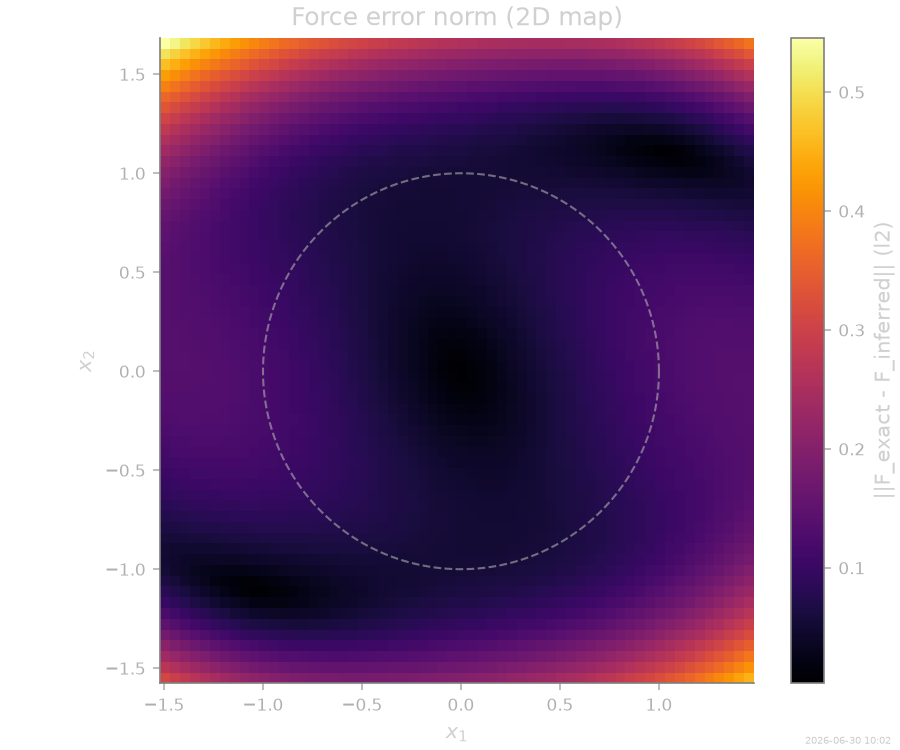
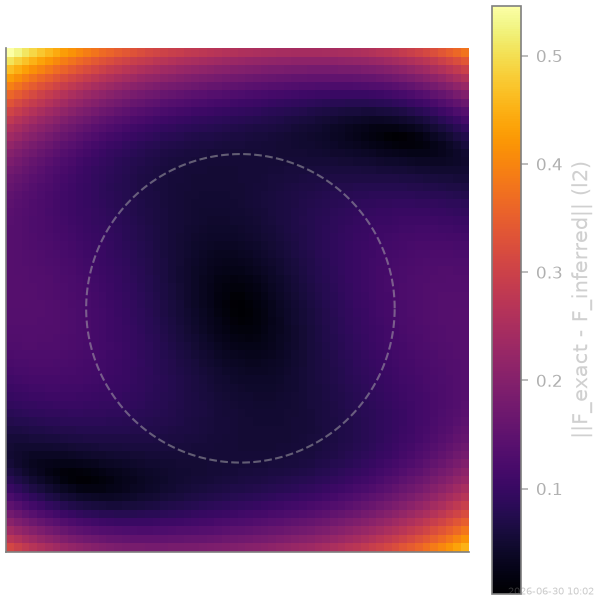
Force error norm¶
A 2D map of the force-reconstruction error \(\|F_{\mathrm{exact}} - F_{\mathrm{inferred}}\|\) evaluated on a regular grid covering the data domain.
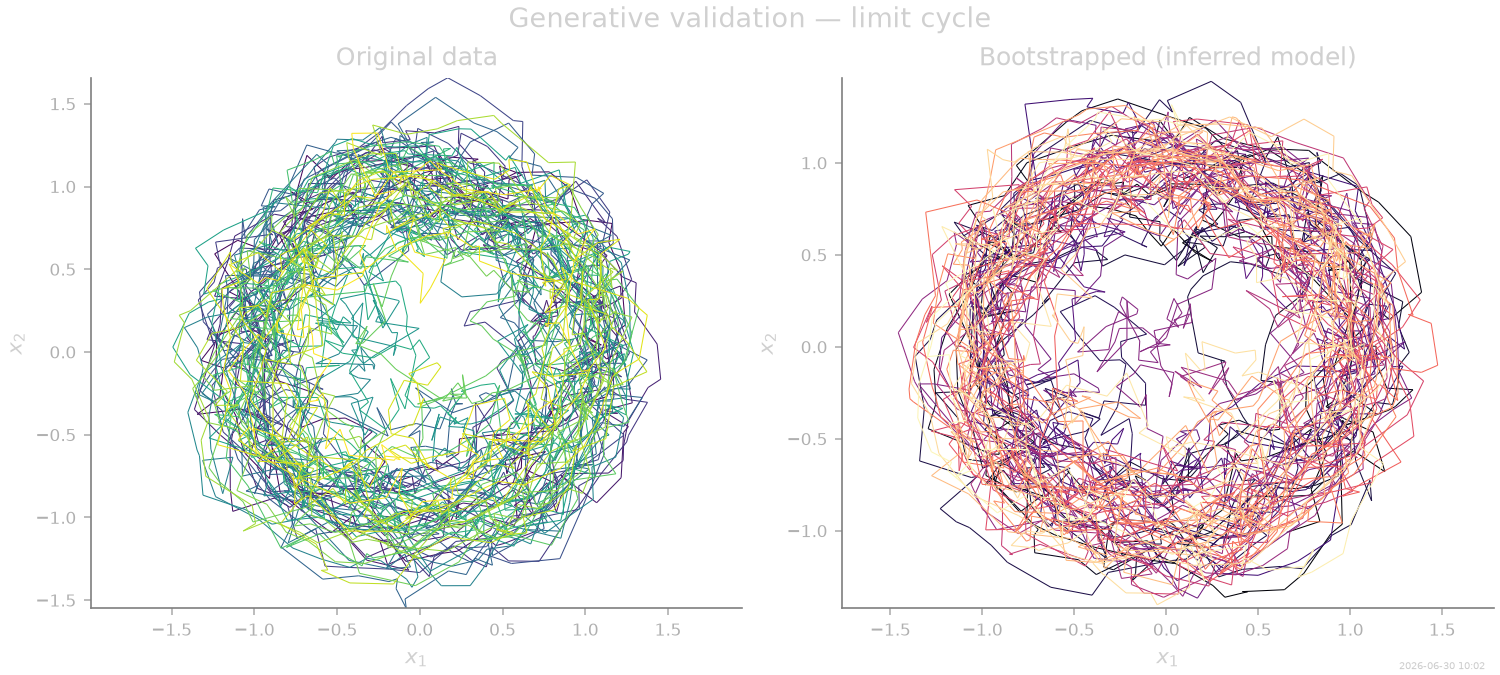
Bootstrapped trajectory¶
A trajectory simulated from the inferred model should reproduce the limit-cycle structure and rotational dynamics.
key_boot = random.PRNGKey(seed + 123)
coll_boot, _ = inf.simulate_bootstrapped_trajectory(key_boot, oversampling=20)
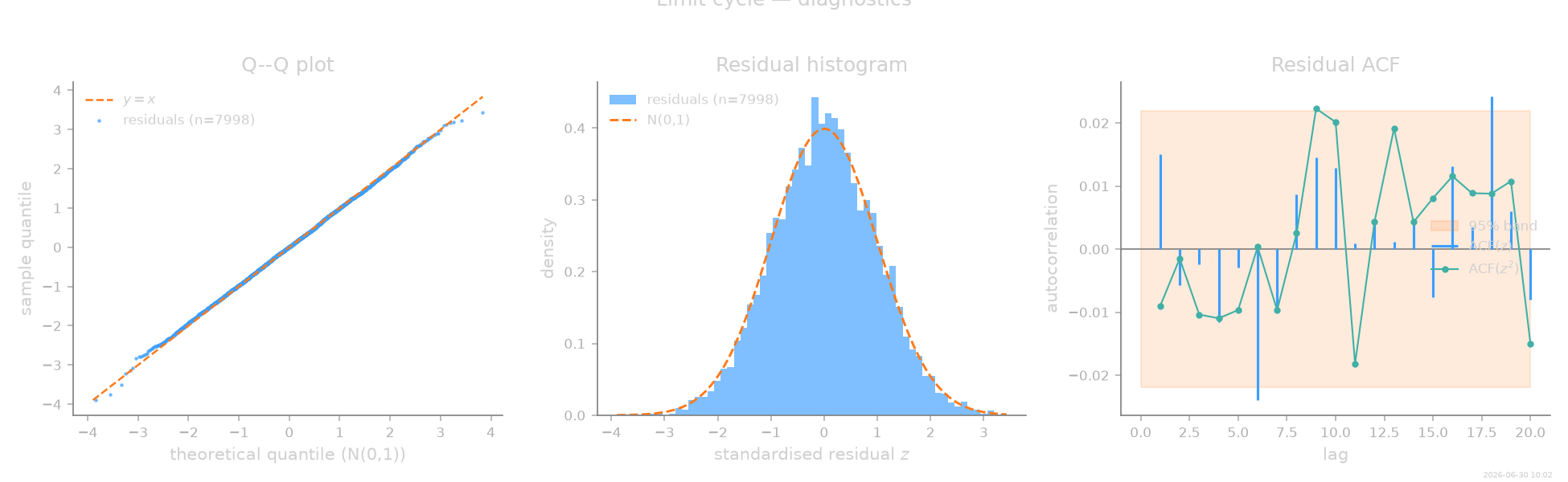
Diagnostics¶
assess() recomputes standardised residuals and
runs a panel of consistency tests; a well-specified fit yields
residuals consistent with i.i.d. \(\mathcal{N}(0, 1)\) — no
autocorrelation, no excess kurtosis, and a realised NMSE consistent
with the predicted value.
from SFI.diagnostics import assess, plot_summary
report = assess(inf, level="standard")
report.print_summary()
=== SFI diagnostics report ===
backend : linear
regime : OD
n_obs : 3999 n_particles: 1 d: 2
level : standard
-- Residuals --
mean = +0.0133 std = 0.9777 skew = +0.007 kurt-3 = +0.010 (n=7998)
✓ normality ks stat=0.0136 p=0.103
✓ autocorr ljung_box stat=20 p=0.456
✓ autocorr ljung_box_squared stat=22.7 p=0.303
predicted NMSE = 0.00476 realised NMSE = 0 χ² z = -2.78 (|z|>5 ⇒ bias)
-- Flags --
(no issues at α = 0.01)
Thumbnail¶
Compact force-error map for the gallery grid.
stamp_output()
[Generated: 2026-06-30 10:02]
Total running time of the script: (0 minutes 22.243 seconds)