Note
Go to the end to download the full example code.
Time-dependent forcing — protocols as extras¶
Infer a force law that depends on a known time-dependent protocol — here a trap whose stiffness is switched between two values — from a single 1D trajectory.
The protocol \(k(t)\) enters SFI as a time-dependent extra: the
simulator consumes it per frame, attaches it to the output collection,
and the inference reads it back through the compositional symbol
extra_scalar(). The same mechanism covers temperature
ramps, oscillating fields, or any drive recorded alongside the
trajectory.
Tags
synthetic · overdamped · linear · 1D · time-dependent
Model: a trap with switched stiffness¶
An overdamped particle in a harmonic trap whose stiffness alternates between two plateaus:
with \(k_0 = 1\), a square-wave drive \(k(t) \in \{0, 1\}\), and \(D = 0.25\). The force model is built compositionally: the drive is a basis symbol read from the dataset’s extras.
import SFI
from SFI.bases import X, extra_scalar
from SFI.langevin import OverdampedProcess
from SFI.trajectory import time_series_extra
dt = 0.01
Nsteps = 20_000
period = 1_000 # frames per plateau
k_protocol = (np.arange(Nsteps) // period % 2).astype(float)
# Two-feature basis: static trap x, and protocol-modulated trap k(t)·x.
B = X(dim=1) & (extra_scalar("k_drive", dim=1) * X(dim=1))
proc = OverdampedProcess(F=B, D=0.25, theta_F=jnp.array([-1.0, -1.0]))
proc.set_extras(extras_global={"k_drive": time_series_extra(k_protocol)})
proc.initialize(jnp.zeros(1))
coll = proc.simulate(dt=dt, Nsteps=Nsteps, key=random.PRNGKey(42), oversampling=4)
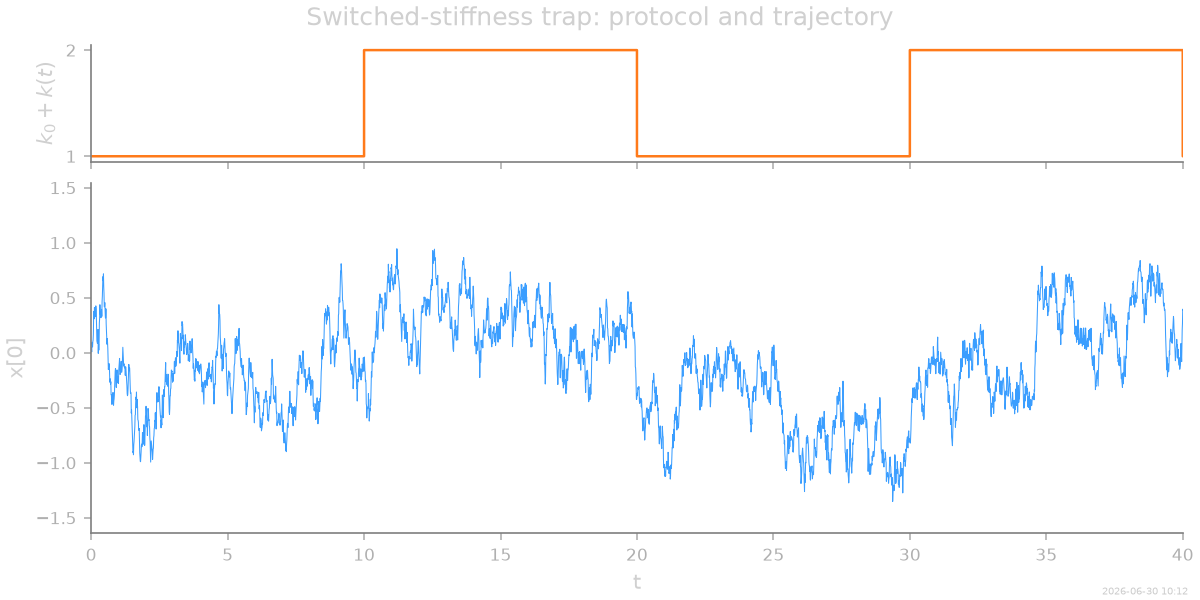
Trajectory and protocol¶
When the drive is on, the trap is twice as stiff and the fluctuations shrink accordingly.
Inference with the protocol as a basis symbol¶
The same two-feature dictionary serves for inference: the linear
estimator reads k_drive per frame from the collection’s extras
(the simulator attached it), so the static and driven contributions
are separated by the protocol’s variation.
inf = SFI.OverdampedLangevinInference(coll)
inf.compute_diffusion_constant()
inf.infer_force_linear(B)
inf.compute_force_error()
inf.print_report()
--- StochasticForceInference Report ---
Average diffusion tensor:
[[0.24711466]]
Measurement noise tensor:
[[2.6887963e-05]]
Force estimated information: 71.08001708984375
Force: estimated normalized mean squared error (sampling only): 0.014068653331150848
Force Coefficient Table
──────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
──────────────────────────────────────────────────────────────────
0 x -1.04602e+00 1.44900e-01 7.2 *
1 k_drive·x -7.57706e-01 2.39010e-01 3.2 *
──────────────────────────────────────────────────────────────────
2/2 basis functions in support, sig: 2* / 0** / 0*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
Recovered stiffness law¶
The two fitted coefficients reconstruct the time-dependent stiffness \(\hat k(t) = -[\hat\theta_1 + \hat\theta_2\,k(t)]\), compared to the ground truth.

Notes¶
In simulation,
set_extrasaccepts aTimeSeriesExtra(one value per recorded frame, held across oversampling substeps) or a plain callablef(t)of physical time; the schedule is attached to the returned collection.In inference, any time-dependent extra in the dataset is sliced per frame automatically;
extra_scalar()turns it into a composable basis symbol.The static and driven features are collinear up to the protocol’s variation — strongly varying protocols (switches, large ramps) identify the split best, and
force_coefficients_stderrreports exactly how well.
stamp_output()
[Generated: 2026-06-30 10:12]
Total running time of the script: (0 minutes 11.147 seconds)