Note
Go to the end to download the full example code.
Gray-Scott reaction-diffusion: SPDE inference¶
Note
Uses the experimental SPDE toolbox — see SPDE (spatial fields) — experimental.
Infer the reaction-diffusion dynamics of a stochastic Gray-Scott system on a 2D grid. This demonstrates SFI’s SPDE capabilities:
GridLayout composing differential operators on named field sectors:
layout.lap(U)applies a 5-point Laplacian stencil to the U sector,layout.grad(U).dot(layout.grad(V))builds cross-gradient features, andlayout.embed(rank=1, ...)compiles everything into a single force modelAuto-generated feature labels from the expression tree, using
with_label()and operator auto-labellingPASTIS sparsification recovering the exact 7-term model from a 34-feature over-specified basis (all order-3 monomials, Laplacians, gradient products, and biharmonics)
Conserved noise —
conserved_noise_pbc()provides \(\nabla\!\cdot\!\boldsymbol\eta\) noise whose spatial average is exactly zero at every time stepOverdamped inference on high-dimensional state spaces
Degradation of spatial data and bootstrap validation
Multi-regime robustness — the same basis recovers the same 7-term structure across distinct \((F, K)\) regimes
The Gray-Scott model defines two interacting fields \(U, V\) with conserved (divergence-form) stochastic transport:
where \(\boldsymbol\eta_{U,V}\) are independent spatiotemporal white vector noises. The conserved noise ensures that any spatial average \(\langle U \rangle, \langle V \rangle\) changes only through the deterministic dynamics, not through noise.
Tags
synthetic · overdamped · SPDE · reaction-diffusion · 2D · sparsification · multi-experiment
System setup¶
We use a 64×64 grid with dx = 1 (physical domain
\(L = 64\)). The Turing wavelength
\(\lambda \approx 2\pi\sqrt{D_U/F} \approx 12\) fits about five
times across the domain, giving well-developed patterns. Inference
is local — it fits the finite-difference stencil at every cell — so
the 4096 cells supply ample constraints for the operators.
The force model is built with GridLayout:
two named ScalarSector fields U and V share a single
layout. Differential operators (layout.lap) and pointwise
algebra (U * V * V) compose freely; layout.embed compiles
the whole expression tree into an inference-ready Basis.
from SFI.bases.spde import conserved_noise_pbc, square_grid_extras
from SFI.langevin import OverdampedProcess
from SFI.statefunc.layout import GridLayout, ScalarSector
DIM = 2 # field dimension (U, V)
GRID = (64, 64)
DT = 0.5
DX = 1.0
STEPS = 500
OVERS = 4
PRERUN = 200 # burn-in frames: let patterns develop before recording
SEED = 0
# Gray-Scott parameters — "coral" regime
DU, DV = 0.16, 0.08
F_gs, K_gs = 0.042, 0.063
# Conserved noise amplitude (same for both fields)
SIGMA = 0.01
# --- GridLayout: two scalar sectors on a 2D periodic grid ---
layout = GridLayout(
U=ScalarSector([0]),
V=ScalarSector([1]),
dim=DIM, ndim=2, bc="pbc",
)
U = layout.U # StructuredExpr for U field
V = layout.V # StructuredExpr for V field
Over-specified basis¶
Rather than hand-coding the exact 7-term Gray-Scott structure, we build a generic basis: all monomials up to order 3 in \((U, V)\), differential operators \(\nabla^2, \nabla^4\), and nonlinear gradient terms \(|\nabla U|^2, |\nabla V|^2, \nabla U \cdot \nabla V\). This gives 17 candidate features per channel = 34 total. PASTIS will prune this down to the correct 7.
Labels are generated automatically from the expression tree —
each single-feature term carries its own human-readable string
via operator auto-labelling (e.g. U ** 2 → "U²",
layout.lap(U) → "∇²U", gU.dot(gV) → "∇U·∇V").
ONE = layout.const(1) # auto: "1"
gU = layout.grad(U)
gV = layout.grad(V)
terms = [
# --- pointwise monomials ---
ONE, # auto: "1"
U, V, # auto: "U", "V"
U**2, U * V, V**2, # auto: "U²", "UV", "V²"
U**3, U**2 * V, U * V**2, V**3, # auto: "U³", "U²V", "UV²", "V³"
# --- Laplacian ---
layout.lap(U), # auto: "∇²U"
layout.lap(V), # auto: "∇²V"
# --- gradient product terms ---
gU.dot(gU), # auto: "∇U·∇U"
gV.dot(gV), # auto: "∇V·∇V"
gU.dot(gV), # auto: "∇U·∇V"
# --- biharmonic ---
layout.biharmonic(U), # auto: "∇⁴U"
layout.biharmonic(V), # auto: "∇⁴V"
]
# Concatenate features using &
generic = terms[0]
for t in terms[1:]:
generic = generic & t
# Same candidate set for both channels
BASIS = layout.embed(rank=1, U=generic, V=generic)
# Labels are auto-derived from the expression tree
auto_labels = list(generic.labels)
n_per = len(auto_labels) # 17
n_feat = 2 * n_per # 34
labels = [f"{lbl}→U̇" for lbl in auto_labels] + \
[f"{lbl}→V̇" for lbl in auto_labels]
# Ground truth: 7 non-zero out of 34
# U channel (indices 0–16): F·1, −F·U, −1·UV², D_U·∇²U
# V channel (indices 17–33): +1·UV², −(F+K)·V, D_V·∇²V
theta_dense = np.zeros(n_feat)
theta_dense[0] = F_gs # 1→U̇
theta_dense[1] = -F_gs # U→U̇
theta_dense[8] = -1.0 # UV²→U̇
theta_dense[10] = DU # ∇²U→U̇
theta_dense[n_per + 8] = +1.0 # UV²→V̇
theta_dense[n_per + 2] = -(F_gs + K_gs) # V→V̇
theta_dense[n_per + 11] = DV # ∇²V→V̇
support_true = list(np.nonzero(theta_dense)[0])
coeffs_true = theta_dense[support_true]
theta_sim = jnp.array(theta_dense, dtype=jnp.float32)
Simulate with burn-in¶
A prerun of 200 frames (100 time units) lets the Turing
pattern develop from the initial seed before we start recording.
This improves inference quality because the data covers the
developed attractor rather than a featureless transient.
noise = conserved_noise_pbc(sigma=SIGMA, grid_shape=GRID, dx=DX, n_fields=DIM)
box_extras = square_grid_extras(grid_shape=GRID, dx=DX)
# Initial condition (symmetry-broken seed in the centre)
Nx, Ny = GRID
U0 = jnp.ones((Nx, Ny), dtype=jnp.float32)
V0 = jnp.zeros((Nx, Ny), dtype=jnp.float32)
r = min(Nx, Ny) // 8
cx, cy = Nx // 2, Ny // 2
U0 = U0.at[cx - r:cx + r, cy - r:cy + r].set(0.50)
V0 = V0.at[cx - r:cx + r, cy - r:cy + r].set(0.25)
key = random.PRNGKey(SEED)
key, sub = random.split(key)
U0 = U0 + 0.02 * random.normal(sub, U0.shape, dtype=U0.dtype)
key, sub = random.split(key)
V0 = V0 + 0.02 * random.normal(sub, V0.shape, dtype=V0.dtype)
X0 = jnp.stack([U0, V0], axis=-1).reshape((Nx * Ny, DIM))
proc = OverdampedProcess(BASIS, D=noise)
proc.set_params(theta_F=theta_sim)
proc.set_extras(extras_global=box_extras)
proc.initialize(X0)
key, sub = random.split(key)
t0 = time.perf_counter()
coll = proc.simulate(
dt=DT, Nsteps=STEPS, key=sub, prerun=PRERUN, oversampling=OVERS,
)
elapsed = time.perf_counter() - t0
print(f"Simulation: {coll.T} frames, prerun={PRERUN} "
f"({elapsed:.1f}s)")
Simulation: 500 frames, prerun=200 (14.6s)
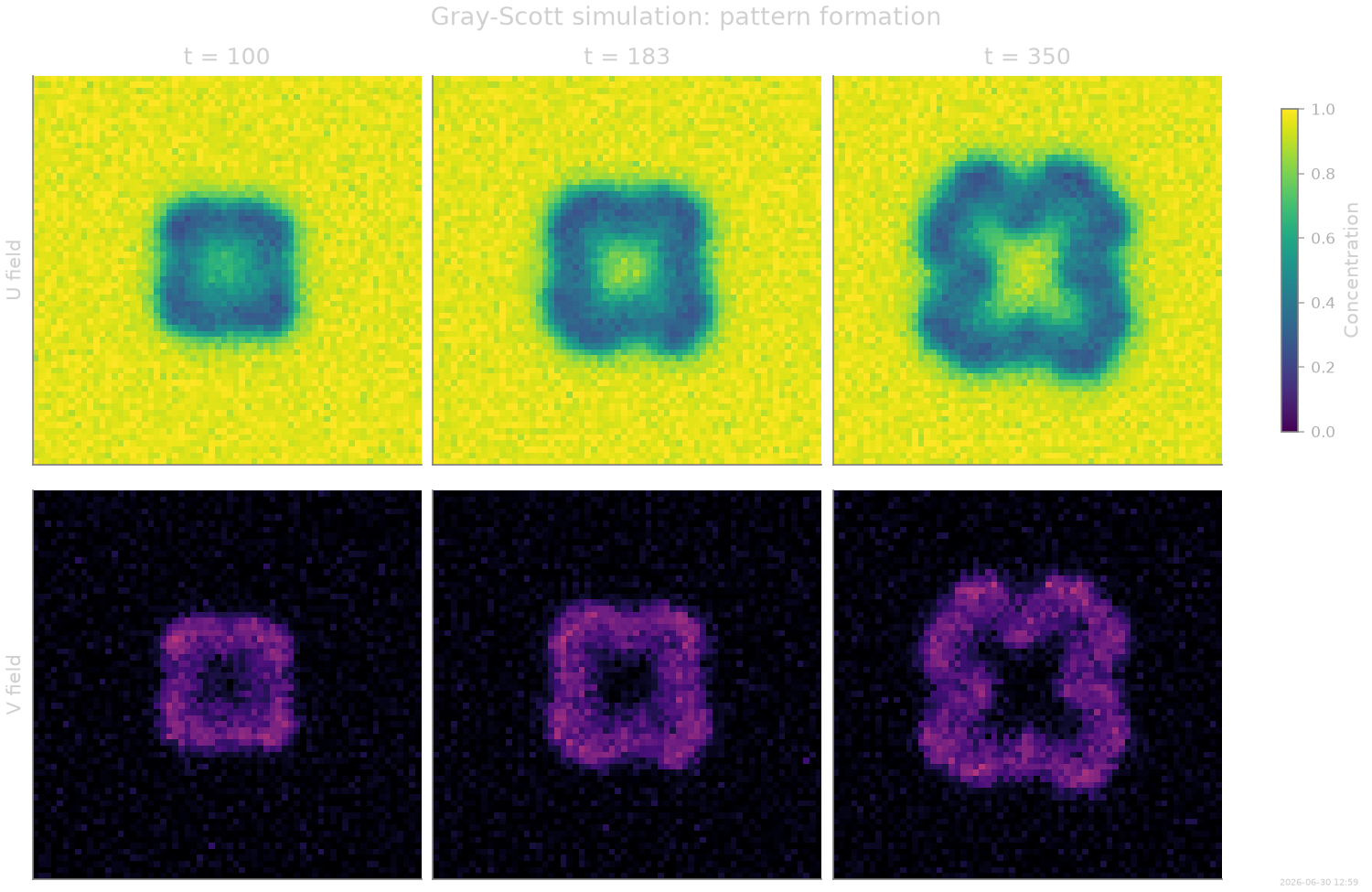
Simulated fields¶
Snapshots of the U and V fields after burn-in. By frame 0 the pattern is already developing; by the final frame the characteristic spot/labyrinth structure has emerged.
T_total = coll.T
snapshots = [0, T_total // 3, T_total - 1]
Degrade and infer¶
We introduce a small random pixel-loss fraction, mimicking missing data in experimental recordings. The 34-feature dense model is inferred first, before sparsification.
Note
Spatial coarsening (downscale > 1) is not applied here.
For stencil-based operators like the Laplacian, down-sampling
changes which neighbours the stencil sees; the coarse-grid
Laplacian is a different finite-difference approximation from
the fine-grid one that generated the data.
from SFI import OverdampedLangevinInference
from SFI.statefunc.nodes.interactions.prepare import purge_cache_extras
from SFI.trajectory.degrade import degrade_spatial_data
coll_deg = degrade_spatial_data(
coll, downscale=1,
data_loss_fraction=0.001, noise=0.0, bc="pbc",
)
coll_deg.extras_global = purge_cache_extras(coll_deg.extras_global)
inf = OverdampedLangevinInference(coll_deg)
inf.compute_diffusion_constant(method="WeakNoise")
inf.infer_force_linear(BASIS, M_mode="Ito")
inf.compute_force_error()
PASTIS sparsification¶
From the 34-feature dense solution, PASTIS selects the minimal model that passes the significance criterion. The 7 reaction-diffusion terms are always recovered; additionally, tiny biharmonic corrections (\(\nabla^4 U, \nabla^4 V\) with coefficients \(\sim 10^{-4}\)) may appear because the finite-difference Laplacian stencil introduces a small systematic \(O(dx^2)\) numerical artefact.
inf.sparsify_force(criterion="PASTIS", p=0.001)
inf.compute_force_error()
inf.compare_to_exact(model_exact=proc, maxpoints=30)
k_sel, support_sel, _, coeffs_sel = \
inf.force_sparsity_result.select_by_ic("PASTIS")
print(f"True support recovered: {set(support_true).issubset(set(support_sel))}")
inf.print_report()
True support recovered: True
--- StochasticForceInference Report ---
Average diffusion tensor:
[[ 6.2343356e-04 -1.4497949e-06]
[-1.4497949e-06 6.4761657e-04]]
Measurement noise tensor:
[[9.0806738e-05 4.7643475e-06]
[4.7643475e-06 5.8317470e-05]]
Force estimated information: 367245.46875
Force: estimated normalized mean squared error (sampling only): 1.497639930227704e-05
Normalized MSE (force): 0.0426
Force Coefficient Table
──────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
──────────────────────────────────────────────────────────────
0 1 5.16088e-02 3.80596e-04 135.6 ***
1 U -5.16175e-02 3.99026e-04 129.4 ***
5 V² 7.19335e-02 5.76799e-03 12.5 **
8 UV² -1.41341e+00 1.53800e-02 91.9 **
10 ∇²U 1.65664e-01 1.06301e-03 155.8 ***
12 ∇U·∇U 8.87408e-02 8.70039e-03 10.2 **
15 ∇⁴U -7.06458e-03 1.84601e-04 38.3 **
19 V -1.27887e-01 1.15641e-03 110.6 ***
25 UV² 1.20779e+00 9.98330e-03 121.0 ***
28 ∇²V 8.13759e-02 7.57109e-04 107.5 ***
33 ∇⁴V -1.61616e-03 1.26602e-04 12.8 **
──────────────────────────────────────────────────────────────
11/34 basis functions in support, sig: 11* / 11** / 6*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
Zeroed (23): V, U², UV, U³, U²V, V³, ∇²V, ∇V·∇V, ∇U·∇V, ∇⁴V, 1, U, U², UV, V², U³, U²V, V³, ∇²U, ∇U·∇U, ∇V·∇V, ∇U·∇V, ∇⁴U
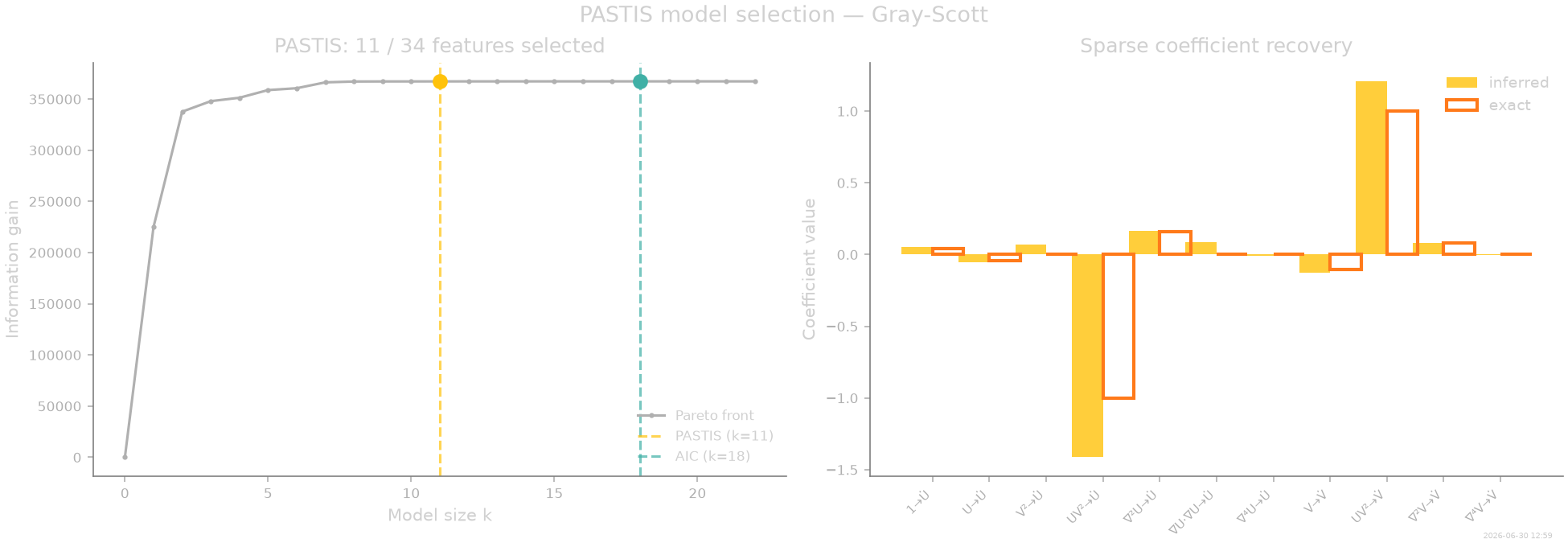
Pareto front and sparse recovery¶
Left: information gain vs model size, with information-criterion thresholds. Right: inferred sparse coefficients overlaid on ground truth.
Coefficient comparison¶
print(model_summary(
labels, np.array(coeffs_sel), support=support_sel,
coeffs_true=coeffs_true, support_true=support_true,
title="Gray-Scott sparse model: true vs inferred",
))
Gray-Scott sparse model: true vs inferred
────────────────────────────────────────────────────────
# Label Coefficient True Sig
────────────────────────────────────────────────────────
0 1→U̇ 5.16088e-02 4.20000e-02 ·
1 U→U̇ -5.16175e-02 -4.20000e-02 ·
5 V²→U̇ 7.19335e-02 0.00000e+00 ·
8 UV²→U̇ -1.41341e+00 -1.00000e+00 ·
10 ∇²U→U̇ 1.65664e-01 1.60000e-01 ·
12 ∇U·∇U→U̇ 8.87408e-02 0.00000e+00 ·
15 ∇⁴U→U̇ -7.06458e-03 0.00000e+00 ·
19 V→V̇ -1.27887e-01 -1.05000e-01 ·
25 UV²→V̇ 1.20779e+00 1.00000e+00 ·
28 ∇²V→V̇ 8.13759e-02 8.00000e-02 ·
33 ∇⁴V→V̇ -1.61616e-03 0.00000e+00 ·
────────────────────────────────────────────────────────
11/34 basis functions in support
Zeroed (23): V→U̇, U²→U̇, UV→U̇, U³→U̇, U²V→U̇, V³→U̇, ∇²V→U̇, ∇V·∇V→U̇, ∇U·∇V→U̇, ∇⁴V→U̇, 1→V̇, U→V̇, U²→V̇, UV→V̇, V²→V̇, U³→V̇, U²V→V̇, V³→V̇, ∇²U→V̇, ∇U·∇U→V̇, ∇V·∇V→V̇, ∇U·∇V→V̇, ∇⁴U→V̇
Bootstrap validation¶
Re-simulate from the inferred sparse model, starting from the first post-burn-in frame.
X0_boot = coll.X[0] # post-burn-in initial condition
key, sub = random.split(key)
proc_boot = inf.simulate_bootstrapped_trajectory(sub, simulate=False)
proc_boot.set_extras(extras_global=box_extras)
proc_boot.initialize(X0_boot)
key, sub = random.split(key)
_boot_ok = False
for _boot_try in range(5):
try:
key, sub = random.split(key)
coll_boot = proc_boot.simulate(
dt=DT, Nsteps=STEPS, key=sub, prerun=0, oversampling=OVERS,
)
_boot_ok = True
break
except ValueError:
print(f" Bootstrap attempt {_boot_try + 1} diverged, retrying...")
if not _boot_ok:
raise RuntimeError("Bootstrap diverged after 5 attempts")
ti_final = min(coll.T, coll_boot.T) - 1
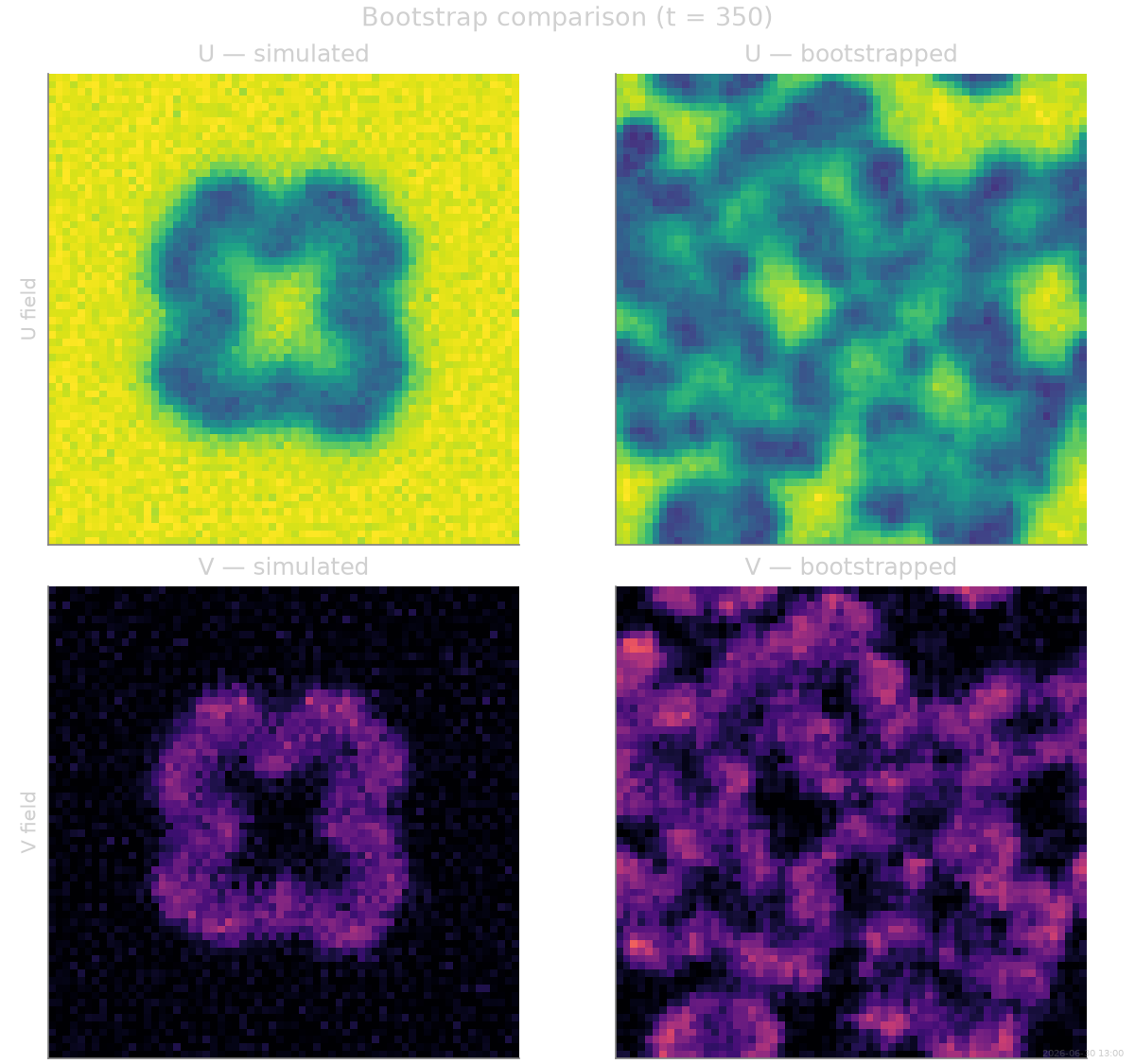
Side-by-side bootstrap movie¶
Animated comparison of original simulation (left) and bootstrap resimulation from the inferred sparse model (right). Both start from the same initial condition but evolve under independent noise realisations — the morphological statistics (spot density, ring thickness …) should match.
T_frames = min(coll.T, coll_boot.T)
skip_gs = max(1, T_frames // 150)
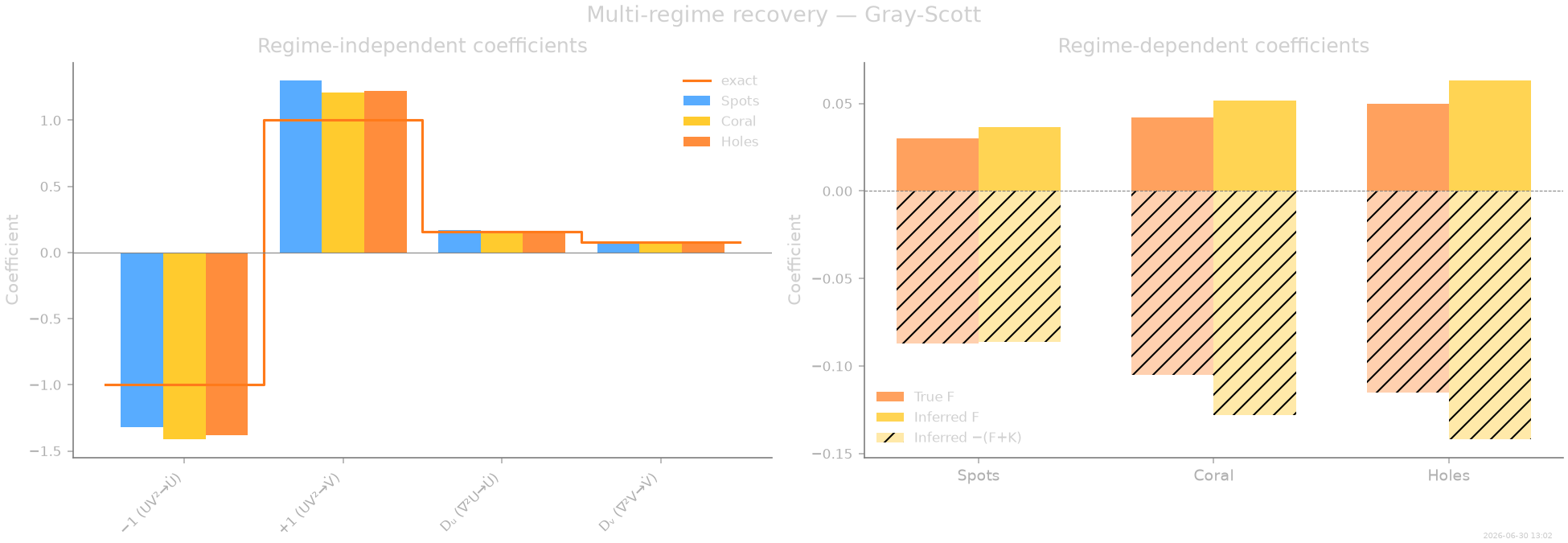
Multi-regime robustness¶
The 7-term reaction-diffusion structure should be recoverable across different \((F, K)\) regimes that produce visually distinct patterns. We re-run the simulate → degrade → infer → PASTIS pipeline on three regimes using the same over-specified basis, and check that PASTIS selects the same structural terms each time. The regime-independent coefficients (\(D_U\), \(D_V\), the \(\pm 1\) couplings) should stay fixed, while \(F\) and \((F{+}K)\) track the parameter change. The “Coral” entry reuses the fit from above.
def _true_theta(F, K):
"""The 7 non-zero coefficients for a given (F, K)."""
th = np.zeros(n_feat)
th[0] = F # 1 → U̇
th[1] = -F # U → U̇
th[8] = -1.0 # UV² → U̇
th[10] = DU # ∇²U → U̇
th[n_per + 8] = +1.0 # UV² → V̇
th[n_per + 2] = -(F + K) # V → V̇
th[n_per + 11] = DV # ∇²V → V̇
return th
def _seed_ic(key):
"""Symmetry-broken central seed, identical recipe to the main run."""
U0r = jnp.ones((Nx, Ny), dtype=jnp.float32)
V0r = jnp.zeros((Nx, Ny), dtype=jnp.float32)
rr = min(Nx, Ny) // 8
cxr, cyr = Nx // 2, Ny // 2
U0r = U0r.at[cxr - rr:cxr + rr, cyr - rr:cyr + rr].set(0.50)
V0r = V0r.at[cxr - rr:cxr + rr, cyr - rr:cyr + rr].set(0.25)
k1, k2 = random.split(key)
U0r = U0r + 0.02 * random.normal(k1, U0r.shape, dtype=U0r.dtype)
V0r = V0r + 0.02 * random.normal(k2, V0r.shape, dtype=V0r.dtype)
return jnp.stack([U0r, V0r], axis=-1).reshape((Nx * Ny, DIM))
# "Coral" is the regime fit above; add two more.
regimes = [("Spots", 0.030, 0.057), ("Coral", F_gs, K_gs), ("Holes", 0.050, 0.065)]
regime_results = {
"Coral": dict(F=F_gs, K=K_gs, support=list(support_sel),
coeffs=np.array(coeffs_sel)),
}
for ri, (rname, Fr, Kr) in enumerate(regimes):
if rname == "Coral":
print(f" {rname:>6} (F={Fr}, K={Kr}): reusing fit from above "
f"({len(support_sel)} terms)")
continue
proc_r = OverdampedProcess(BASIS, D=noise)
proc_r.set_params(theta_F=jnp.array(_true_theta(Fr, Kr), dtype=jnp.float32))
proc_r.set_extras(extras_global=box_extras)
key, sub_ic = random.split(key)
proc_r.initialize(_seed_ic(sub_ic))
key, sub = random.split(key)
coll_r = proc_r.simulate(dt=DT, Nsteps=STEPS, key=sub,
prerun=PRERUN, oversampling=OVERS)
coll_rd = degrade_spatial_data(
coll_r, downscale=1, data_loss_fraction=0.001, noise=0.0, bc="pbc",
)
coll_rd.extras_global = purge_cache_extras(coll_rd.extras_global)
inf_r = OverdampedLangevinInference(coll_rd)
inf_r.compute_diffusion_constant(method="WeakNoise")
inf_r.infer_force_linear(BASIS, M_mode="Ito")
inf_r.compute_force_error()
inf_r.sparsify_force(criterion="PASTIS", p=0.001)
inf_r.compute_force_error()
ks, sup_s, _, co_s = inf_r.force_sparsity_result.select_by_ic("PASTIS")
regime_results[rname] = dict(F=Fr, K=Kr, support=list(sup_s),
coeffs=np.array(co_s))
print(f" {rname:>6} (F={Fr}, K={Kr}): "
f"true terms recovered = {set(support_true).issubset(set(sup_s))}")
def _coeff(res, idx):
"""Inferred coefficient at full-basis index idx (0 if pruned)."""
return float(res["coeffs"][res["support"].index(idx)]) \
if idx in res["support"] else 0.0
Spots (F=0.03, K=0.057): true terms recovered = True
Coral (F=0.042, K=0.063): reusing fit from above (11 terms)
Holes (F=0.05, K=0.065): true terms recovered = True
Thumbnail¶
stamp_output()
[Generated: 2026-06-30 13:02]
Total running time of the script: (3 minutes 26.489 seconds)