Note
Go to the end to download the full example code.
Anisotropic diffusion tensor field¶
Recover a position-dependent, anisotropic diffusion tensor \(D(\mathbf{x})\) from a single 2D trajectory — model-free. A tracer in a ring trap experiences fluctuations whose radial component grows with distance from the center (think of a probe in a radially stretched gel, or near a topological defect in an active film): the local noise ellipse rotates with position. A polynomial tensor basis recovers the full field, including its principal axes.
Tags
synthetic · overdamped · multiplicative-noise · diffusion-field · anisotropic · 2D
Model and simulation¶
A particle in a ring potential \(U = \tfrac{k}{4}(r^2 - R^2)^2\) with a radially anisotropic diffusion tensor (Itô convention):
Radial kicks grow with \(r\); tangential noise stays at \(D_0\). Both fields are polynomial, so we can build them compositionally from coordinate and matrix-template primitives.
import SFI
from SFI.bases import identity_matrix_basis, symmetric_matrix_basis, unit_axes, x_components
from SFI.langevin import OverdampedProcess
k = 4.0 # ring trap stiffness
R = 1.5 # ring radius
D0 = 0.2 # isotropic (tangential) diffusion
a = 0.15 # radial anisotropy growth
dt = 0.005
Nsteps = 50_000
x, y = x_components(2)
ex, ey = unit_axes(2)
I = identity_matrix_basis(2)
S = symmetric_matrix_basis(2) # templates Sxx, Sxy, Syy
Sxx, Sxy, Syy = S[0], S[1], S[2]
r2 = x**2 + y**2
F_model = (-k * (r2 - R**2)) * (x * ex + y * ey)
D_model = D0 * I + a * (x**2 * Sxx + x * y * Sxy + y**2 * Syy)
proc = OverdampedProcess(F=F_model, D=D_model,
theta_F=jnp.ones(F_model.n_features),
theta_D=jnp.ones(D_model.n_features))
proc.initialize(jnp.array([R, 0.0]))
coll = proc.simulate(dt=dt, Nsteps=Nsteps, key=random.PRNGKey(11),
prerun=500, oversampling=10)
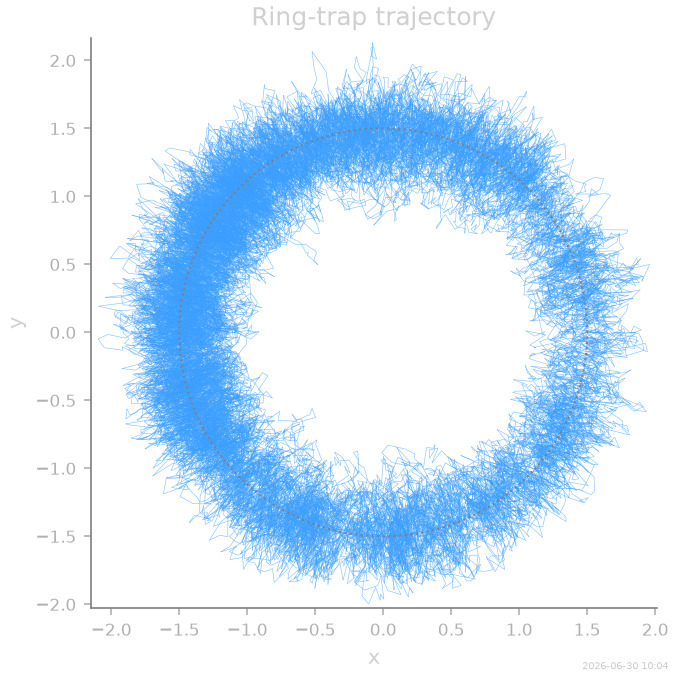
Trajectory¶
The tracer diffuses around the annulus, sampling all orientations of the local anisotropy.
Inference¶
Same canonical sequence as in 1D — the only change is the rank-2 tensor basis for the diffusion field: degree-2 matrix monomials, spanning all symmetric-tensor fields with polynomial entries (18 features; the truth uses 5 of them).
from SFI.bases import monomials_up_to
B_force = monomials_up_to(order=3, dim=2, rank="vector")
B_diff = monomials_up_to(order=2, dim=2, rank="symmetric_matrix")
inf = SFI.OverdampedLangevinInference(coll)
inf.compute_diffusion_constant()
inf.infer_force_linear(B_force)
inf.compute_force_error()
inf.infer_diffusion_linear(B_diff)
inf.compare_to_exact(model_exact=proc)
inf.print_report()
--- StochasticForceInference Report ---
Average diffusion tensor:
[[ 0.33276835 -0.01264946]
[-0.01264946 0.33020318]]
Measurement noise tensor:
[[ 1.17328607e-04 -1.01671212e-05]
[-1.01671212e-05 1.06286105e-04]]
Force estimated information: 1458.69287109375
Force: estimated normalized mean squared error (sampling only): 0.006855446174737724
Normalized MSE (force): 0.0092
Normalized MSE (diffusion): 0.0235
Force Coefficient Table
─────────────────────────────────────────────────────────────────────
# Label Coefficient Std.Err SNR Sig
─────────────────────────────────────────────────────────────────────
0 1·e0 -9.40828e-03 2.64348e-01 0.0 ·
1 1·e1 1.33710e-01 2.63323e-01 0.5 ·
2 x0·e0 8.36846e+00 2.58974e-01 32.3 **
3 x0·e1 2.15885e-01 2.57973e-01 0.8 ·
4 x1·e0 -1.86756e-01 2.41069e-01 0.8 ·
5 x1·e1 8.27424e+00 2.40137e-01 34.5 **
6 x0^2·e0 2.46907e-02 1.21943e-01 0.2 ·
7 x0^2·e1 -1.71195e-02 1.21471e-01 0.1 ·
8 (x0·x1)·e0 1.59657e-02 7.07004e-02 0.2 ·
9 (x0·x1)·e1 2.04636e-02 7.04274e-02 0.3 ·
10 x1^2·e0 -3.27893e-02 1.21499e-01 0.3 ·
11 x1^2·e1 -1.04222e-01 1.21027e-01 0.9 ·
12 x0^3·e0 -3.70496e+00 1.10419e-01 33.6 **
13 x0^3·e1 -1.09802e-01 1.09993e-01 1.0 ·
14 (x0^2·x1)·e0 7.52521e-02 1.20086e-01 0.6 ·
15 (x0^2·x1)·e1 -3.62706e+00 1.19622e-01 30.3 **
16 (x0·x1^2)·e0 -3.71582e+00 1.26633e-01 29.3 **
17 (x0·x1^2)·e1 -3.57414e-02 1.26144e-01 0.3 ·
18 x1^3·e0 1.06565e-01 1.03542e-01 1.0 ·
19 x1^3·e1 -3.69748e+00 1.03142e-01 35.8 **
─────────────────────────────────────────────────────────────────────
20/20 basis functions in support, sig: 6* / 6** / 0*** (|SNR| ≥ 2 / 10 / 100)
(Std.err. reflects sampling error only; discretization bias is not included.)
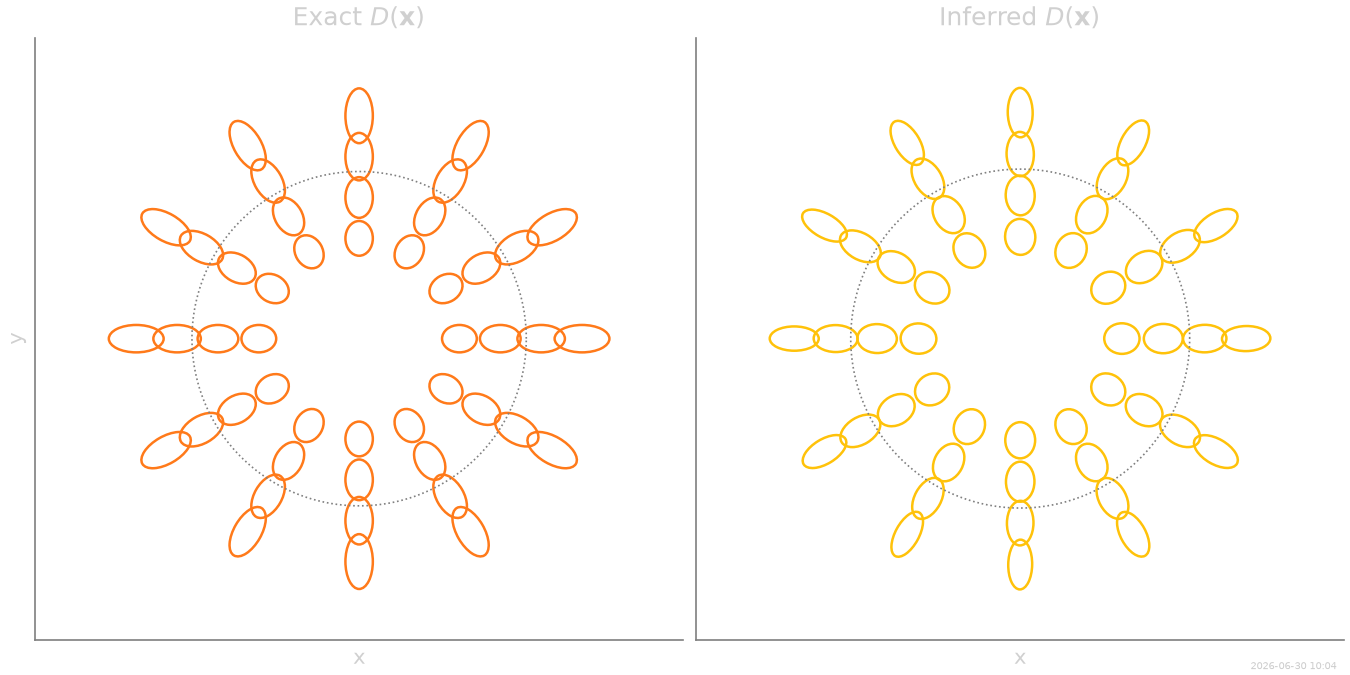
Tensor glyphs: exact vs inferred¶
Each glyph is the ellipse \(\mathbf{u}^{\!\top} D^{-1}\mathbf{u} = \text{const}\) of the local tensor — long axis along the fast direction. Exact field on the left, inferred on the right: the radial orientation and the \(r^2\) growth are both recovered.
# Glyph positions on a polar grid covering the sampled annulus, and a
# callable for the exact tensor field D(x) = D0 I + a r^2 r-hat r-hat^T.
r_glyph = np.linspace(0.9, 2.0, 4)
th_glyph = np.linspace(0, 2 * np.pi, 12, endpoint=False)
pts = np.array([[r * np.cos(t), r * np.sin(t)] for r in r_glyph for t in th_glyph])
def D_exact_field(p):
p = np.asarray(p).reshape(-1, 2)
return np.array([D0 * np.eye(2) + a * np.outer(q, q) for q in p])
def D_inferred_field(p):
return inf.diffusion_inferred(jnp.asarray(p))
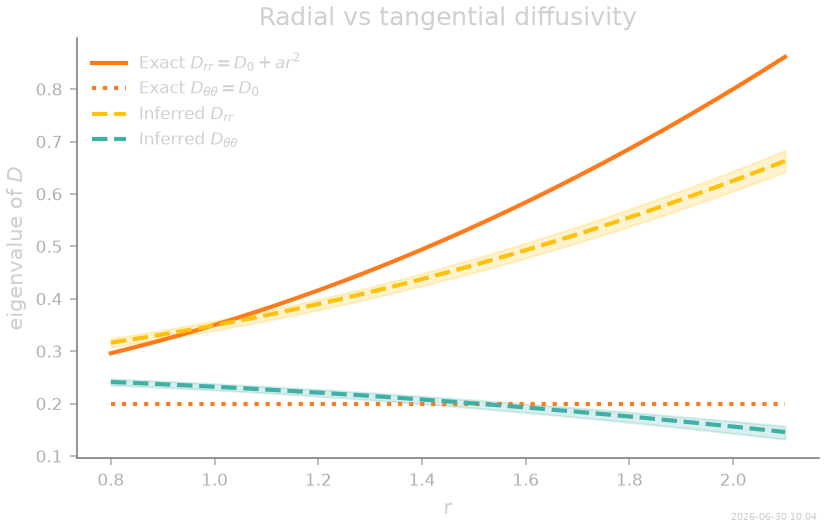
Radial and tangential eigenvalues¶
Projecting the inferred tensor onto the local radial and tangential directions separates the two physical components: the radial diffusivity grows as \(D_0 + a r^2\) while the tangential one stays flat at \(D_0\).
r_prof = np.linspace(0.8, 2.1, 30)
th_s = np.linspace(0, 2 * np.pi, 24, endpoint=False)
D_rr = np.zeros((len(r_prof), len(th_s)))
D_tt = np.zeros_like(D_rr)
for j, t_ in enumerate(th_s):
pts_ray = np.column_stack([r_prof * np.cos(t_), r_prof * np.sin(t_)])
D_ray = np.asarray(inf.diffusion_inferred(jnp.array(pts_ray)))
rhat = np.array([np.cos(t_), np.sin(t_)])
that = np.array([-np.sin(t_), np.cos(t_)])
D_rr[:, j] = np.einsum("i,nij,j->n", rhat, D_ray, rhat)
D_tt[:, j] = np.einsum("i,nij,j->n", that, D_ray, that)
#
# Shaded bands show the spread over sampling angles — a measure of how
# isotropically the basis error is distributed. The same workflow
# applies unchanged to experimental 2D tracking data; see the
# :doc:`multiplicative-noise demo <multiplicative_diffusion_demo>` for
# the Itô-convention caveats that come with state-dependent noise.
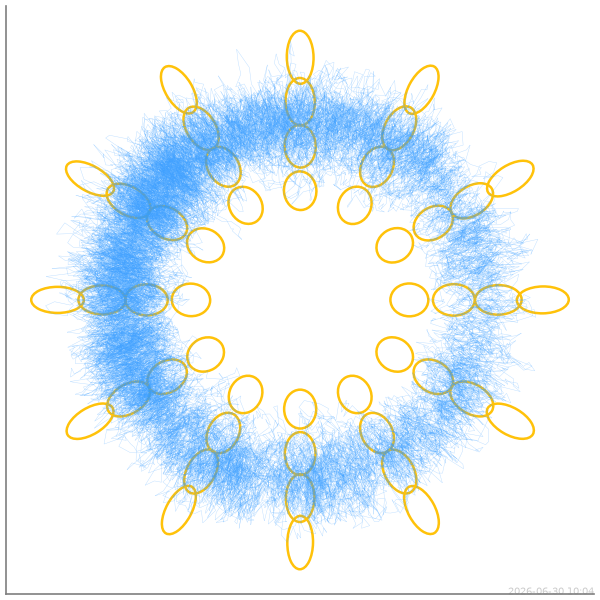
Thumbnail¶
Dedicated single-panel figure for the gallery thumbnail.
stamp_output()
[Generated: 2026-06-30 10:04]
Total running time of the script: (0 minutes 19.985 seconds)